Chapter 12: Polynomial Fitting & Interpolation#
Topics Covered:
Polynomial basics:
np.poly1d,np.polyval,np.polyfitLeast-squares polynomial fitting: choosing the right degree, residuals, \(R^2\)
Taylor series: definition, convergence, and ChE linearization
Polynomial interpolation: Lagrange method and Runge’s phenomenon
Spline interpolation:
CubicSpline,interp1d, and steam table application
# ── All imports ─────────────────────────────────────────────────────────────
import numpy as np
import matplotlib.pyplot as plt
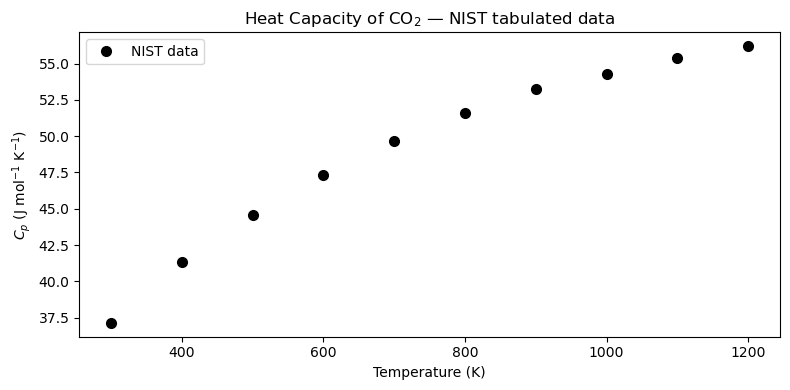
12.1 Motivation: Heat Capacity of CO\(_2\)#
In chemical engineering, we frequently need \(C_p(T)\) — the molar heat capacity as a function of temperature — to compute:
NIST publishes \(C_p\) in tabulated form at discrete temperatures. Before we can integrate, we need a continuous mathematical model — a polynomial — that passes smoothly through the data.
Below is a subset of NIST data for CO\(_2\) (ideal gas, J mol\(^{-1}\) K\(^{-1}\)):
\(T\) (K) |
\(C_p\) (J mol\(^{-1}\) K\(^{-1}\)) |
|---|---|
300 |
37.13 |
400 |
41.33 |
500 |
44.60 |
600 |
47.33 |
700 |
49.65 |
800 |
51.61 |
900 |
53.26 |
1000 |
54.31 |
1100 |
55.37 |
1200 |
56.21 |
We want to fit \(C_p(T) \approx a_0 + a_1 T + a_2 T^2 + \cdots\) so we can evaluate it at any temperature and integrate it analytically.
# NIST tabulated Cp data for CO2 (ideal gas)
T_data = np.array([300, 400, 500, 600, 700, 800, 900, 1000, 1100, 1200], dtype=float) # K
Cp_data = np.array([37.13, 41.33, 44.60, 47.33, 49.65,
51.61, 53.26, 54.31, 55.37, 56.21]) # J/(mol K)
fig, ax = plt.subplots(figsize=(8, 4))
ax.plot(T_data, Cp_data, 'ko', markersize=7, label='NIST data')
ax.set_xlabel('Temperature (K)')
ax.set_ylabel(r'$C_p$ (J mol$^{-1}$ K$^{-1}$)')
ax.set_title(r'Heat Capacity of CO$_2$ — NIST tabulated data')
ax.legend()
plt.tight_layout()
plt.show()
12.2 Polynomial Basics#
A degree-\(n\) polynomial is:
NumPy stores polynomial coefficients in descending order (highest power first). Three key tools:
Function |
Purpose |
|---|---|
|
Create a callable polynomial object |
|
Evaluate polynomial at \(x\) |
|
Least-squares fit: returns coefficients |
Convention: coeffs = [a_n, a_{n-1}, ..., a_1, a_0] — highest power first.
The coefficient array#
Say you have \(p(x) = 3x^2 + 5x - 2\). NumPy represents this as [3, 5, -2]:
index: 0 1 2
value: [3, 5, -2]
↑ ↑ ↑
x² x¹ x⁰
np.poly1d(coeffs) — callable polynomial object#
Wraps the coefficient list into an object you can call like a function:
p = np.poly1d([3, 5, -2])
p(1) # → 3(1)² + 5(1) - 2 = 6
p(0) # → -2
Bonus methods: p.deriv() (derivative), p.integ() (integral), p.roots (zeros).
np.polyval(coeffs, x) — evaluate from the list directly#
Same result, no object needed. Works on scalars or arrays:
np.polyval([3, 5, -2], 1) # → 6
np.polyval([3, 5, -2], [0, 1, 2]) # → [-2, 6, 20]
Use this when you only need values and don’t need derivatives/integrals.
np.polyfit(x, y, deg) — find best-fit coefficients#
Given data points, returns a coefficient array in the same descending convention:
coeffs = np.polyfit(x_data, y_data, deg=3) # fit → coeffs
p = np.poly1d(coeffs) # wrap → callable
y_fit = p(x_fine) # evaluate on dense grid
# or equivalently:
y_fit = np.polyval(coeffs, x_fine)
Use poly1d when you also need .deriv() / .integ() / .roots; use polyval when you just need numbers.
# ── Coefficient convention demo ───────────────────────────────────────────
# p(x) = 3x² + 5x - 2 → coeffs = [3, 5, -2] (descending order)
coeffs_demo = [3, 5, -2]
p_demo = np.poly1d(coeffs_demo)
print("poly1d pretty-print:")
print(p_demo)
# Evaluate at a few points
xs = [0, 1, 2]
print("\nx poly1d polyval manual")
for x in xs:
manual = 3*x**2 + 5*x - 2
print(f"{x} {p_demo(x):6.1f} {np.polyval(coeffs_demo, x):6.1f} {manual:6.1f}")
# polyval works on arrays too
print("\npolyval on array [0,1,2]:", np.polyval(coeffs_demo, xs))
# Derivative and integral via poly1d
print("\nDerivative p'(x):")
print(p_demo.deriv())
print("Indefinite integral ∫p dx (+ C):")
print(p_demo.integ())
print("Roots (p(x)=0):", p_demo.roots.round(4))
poly1d pretty-print:
2
3 x + 5 x - 2
x poly1d polyval manual
0 -2.0 -2.0 -2.0
1 6.0 6.0 6.0
2 20.0 20.0 20.0
polyval on array [0,1,2]: [-2 6 20]
Derivative p'(x):
6 x + 5
Indefinite integral ∫p dx (+ C):
3 2
1 x + 2.5 x - 2 x
Roots (p(x)=0): [-2. 0.3333]
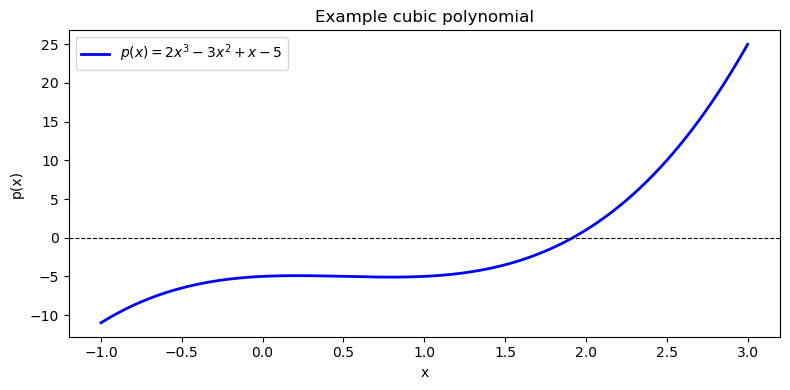
# Define p(x) = 2x^3 - 3x^2 + x - 5 (coefficients in descending order)
coeffs = [2, -3, 1, -5]
p = np.poly1d(coeffs)
print("Polynomial p(x):")
print(p)
# Evaluate at x = 2
x_val = 2.0
print(f"\np({x_val}) using poly1d : {p(x_val):.4f}")
print(f"p({x_val}) using polyval : {np.polyval(coeffs, x_val):.4f}")
# Manual: 2(8) - 3(4) + 1(2) - 5 = 16 - 12 + 2 - 5 = 1
print(f"Manual check : {2*x_val**3 - 3*x_val**2 + 1*x_val - 5:.4f}")
Polynomial p(x):
3 2
2 x - 3 x + 1 x - 5
p(2.0) using poly1d : 1.0000
p(2.0) using polyval : 1.0000
Manual check : 1.0000
# Plot the polynomial over [-1, 3]
x = np.linspace(-1, 3, 200)
y = np.polyval(coeffs, x)
fig, ax = plt.subplots(figsize=(8, 4))
ax.plot(x, y, 'b-', linewidth=2, label=r'$p(x) = 2x^3 - 3x^2 + x - 5$')
ax.axhline(0, color='k', linewidth=0.8, linestyle='--')
ax.set_xlabel('x')
ax.set_ylabel('p(x)')
ax.set_title('Example cubic polynomial')
ax.legend()
plt.tight_layout()
plt.show()
12.3 Least-Squares Polynomial Fitting#
np.polyfit(x, y, deg) finds the degree-deg polynomial coefficients that minimize the sum of squared residuals:
This is ordinary least squares applied to a polynomial basis. The function returns coefficients in descending order (highest power first), just like np.poly1d expects.
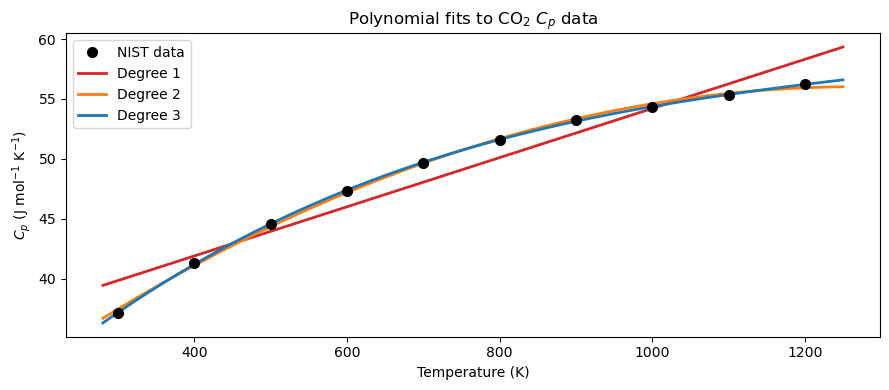
12.3.1 Fitting Cp(T) with Different Degrees#
We fit the CO\(_2\) data with degree 1, 2, and 3 polynomials and compare the results visually.
# ── Fit Cp(T) with degree 1, 2, 3 polynomials ────────────────────────────────
T_fine = np.linspace(280, 1250, 300)
degrees = [1, 2, 3]
colors = ['tab:red', 'tab:orange', 'tab:blue']
fits = {} # store coefficient arrays keyed by degree
for deg in degrees:
fits[deg] = np.polyfit(T_data, Cp_data, deg)
fig, ax = plt.subplots(figsize=(9, 4))
ax.plot(T_data, Cp_data, 'ko', markersize=7, zorder=5, label='NIST data')
for deg, color in zip(degrees, colors):
ax.plot(T_fine, np.polyval(fits[deg], T_fine),
color=color, linewidth=2, label=f'Degree {deg}')
ax.set_xlabel('Temperature (K)')
ax.set_ylabel(r'$C_p$ (J mol$^{-1}$ K$^{-1}$)')
ax.set_title(r'Polynomial fits to CO$_2$ $C_p$ data')
ax.legend()
plt.tight_layout()
plt.show()
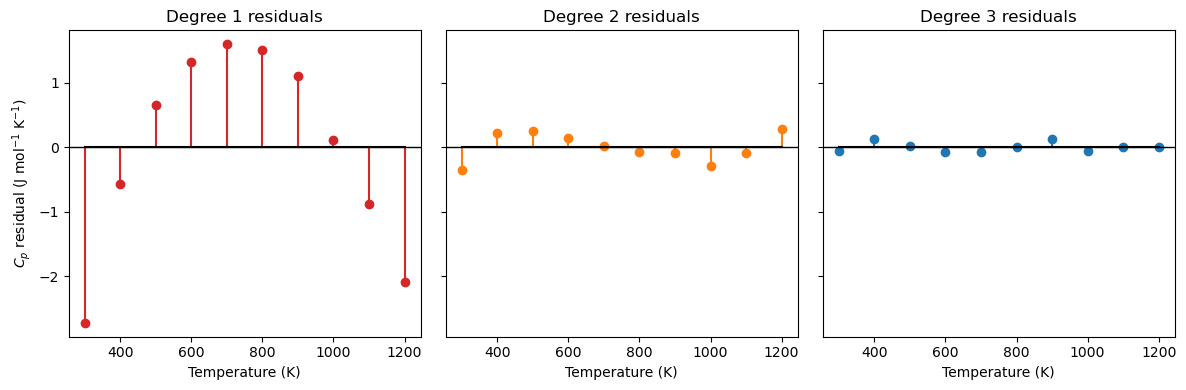
The residual \(e_i\) is the vertical distance between a measured data point and the model’s prediction at that same \(x\):
A positive residual means the model underpredicts; negative means it overpredicts. A good fit has residuals that are small and scattered randomly around zero.
# ── Residual stem plots for each degree ──────────────────────────────────────
fig, axes = plt.subplots(1, 3, figsize=(12, 4), sharey=True)
for ax, deg, color in zip(axes, degrees, colors):
Cp_pred = np.polyval(fits[deg], T_data)
residuals = Cp_data - Cp_pred
ax.stem(T_data, residuals, linefmt=color, markerfmt='o', basefmt='k-')
ax.axhline(0, color='k', linewidth=1)
ax.set_xlabel('Temperature (K)')
ax.set_title(f'Degree {deg} residuals')
axes[0].set_ylabel(r'$C_p$ residual (J mol$^{-1}$ K$^{-1}$)')
plt.tight_layout()
plt.show()
12.3.2 Fit Quality Metrics: MAE, MSE, and \(R^2\)#
Given residuals \(e_i = y_i - p(x_i)\), where:
\(y_i\) — observed (measured) value at point \(i\)
\(p(x_i)\) — model-predicted value at the same point \(x_i\)
three standard metrics quantify how well the model fits the data:
Metric |
Full name |
Units |
Interpretation |
|---|---|---|---|
MAE |
Mean Absolute Error |
same as \(y\) |
Average magnitude of error; easy to interpret |
MSE |
Mean Squared Error |
\(y^2\) |
Penalizes large errors more heavily; used by least-squares optimization |
\(R^2\) |
Coefficient of Determination |
dimensionless |
Fraction of variance explained by the model; 1 = perfect |
Why square in MSE (and not just use MAE)?
Penalize large errors more heavily — an error of 2 contributes 4× more than an error of 1; the fit is driven by the worst offenders
Smooth, differentiable objective — \(e_i^2\) has a clean derivative everywhere, which is what allows least-squares to be solved analytically; \(|e_i|\) is not differentiable at zero
Interpreting \(R^2\): The denominator \(\sum_i(y_i - \bar{y})^2\) is the total variance in the data (how spread out the measurements are). The numerator \(\sum_i e_i^2\) is the variance the model failed to explain. Subtracting their ratio from 1 gives the fraction the model does explain.
\(R^2 = 1\) — perfect fit; every residual is zero
\(R^2 = 0\) — the model does no better than just predicting \(\bar{y}\) for every point
\(R^2 < 0\) — the model is worse than the mean (a sign something is seriously wrong)
import numpy as np
# ── MAE, MSE, R² for each polynomial degree ──────────────────────────────────
SS_tot = np.sum((Cp_data - np.mean(Cp_data))**2)
print(f"{'Degree':>6} {'MAE':>18} {'MSE':>18} {'R²':>10}")
print(f"{'':>6} {'(J/mol/K)':>18} {'(J/mol/K)²':>18} {'':>10}")
print("-" * 60)
for deg in degrees:
Cp_pred = np.polyval(fits[deg], T_data)
residuals = Cp_data - Cp_pred
MAE = np.mean(np.abs(residuals))
MSE = np.mean(residuals**2)
R2 = 1.0 - np.sum(residuals**2) / SS_tot
print(f"{deg:>6} {MAE:>18.6f} {MSE:>18.6f} {R2:>10.6f}")
Degree MAE MSE R²
(J/mol/K) (J/mol/K)²
------------------------------------------------------------
1 1.256000 2.114124 0.942543
2 0.179212 0.043519 0.998817
3 0.052923 0.004851 0.999868
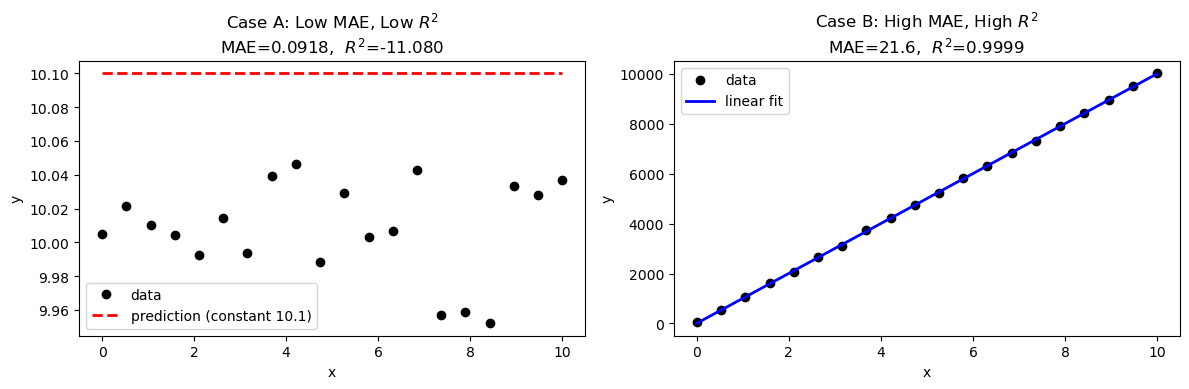
12.3.3 MAE vs \(R^2\): They Can Disagree#
MAE and \(R^2\) measure different things, so a model can score well on one and poorly on the other.
Case A — Low MAE, low \(R^2\): All errors are small in absolute magnitude, but the data has almost no variance. The model barely outperforms the flat mean, so \(R^2\) stays near zero even though MAE looks fine.
Case B — High MAE, high \(R^2\): The data has a huge range (high variance). Errors are large in absolute units, giving a high MAE — but the model tracks the trend so well that \(R^2\) is still close to 1.
The takeaway: always report both. MAE tells you the error in physical units (is it acceptable for your application?); \(R^2\) tells you whether the model captures the structure of the data.
import numpy as np
import matplotlib.pyplot as plt
def metrics(y, y_pred):
e = y - y_pred
mae = np.mean(np.abs(e))
mse = np.mean(e**2)
ss_res = np.sum(e**2)
ss_tot = np.sum((y - np.mean(y))**2)
r2 = 1 - ss_res / ss_tot
return mae, mse, r2
# ── Case A: Low MAE, Low R² ───────────────────────────────────────────────────
# Data clusters tightly around 10.0 (very low variance).
# The model predicts a constant 10.1 — errors are tiny, but so is the spread,
# so R² is low because the model barely beats the mean.
np.random.seed(0)
x_A = np.linspace(0, 10, 20)
y_A = 10.0 + np.random.uniform(-0.05, 0.05, 20) # near-flat data, range ≈ 0.1
yp_A = np.full_like(y_A, 10.1) # constant prediction slightly off
mae_A, mse_A, r2_A = metrics(y_A, yp_A)
print("Case A — Low MAE, Low R²")
print(f" Data range : {y_A.min():.3f} – {y_A.max():.3f} (spread ≈ {y_A.max()-y_A.min():.3f})")
print(f" MAE = {mae_A:.4f} MSE = {mse_A:.6f} R² = {r2_A:.4f}")
# ── Case B: High MAE, High R² ─────────────────────────────────────────────────
# Data spans 0–10 000 (huge variance) with a clean linear trend.
# A linear fit tracks it perfectly (R² ≈ 1), but residuals are ~50 units → high MAE.
x_B = np.linspace(0, 10, 20)
y_B = 1000 * x_B + np.random.uniform(-50, 50, 20) # large range, noisy
coeffs_B = np.polyfit(x_B, y_B, 1)
yp_B = np.polyval(coeffs_B, x_B)
mae_B, mse_B, r2_B = metrics(y_B, yp_B)
print("\nCase B — High MAE, High R²")
print(f" Data range : {y_B.min():.1f} – {y_B.max():.1f} (spread ≈ {y_B.max()-y_B.min():.1f})")
print(f" MAE = {mae_B:.4f} MSE = {mse_B:.2f} R² = {r2_B:.4f}")
# ── Plot ──────────────────────────────────────────────────────────────────────
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
ax = axes[0]
ax.plot(x_A, y_A, 'ko', markersize=6, label='data')
ax.plot(x_A, yp_A, 'r--', linewidth=2, label='prediction (constant 10.1)')
ax.set_title(f'Case A: Low MAE, Low $R^2$\nMAE={mae_A:.4f}, $R^2$={r2_A:.3f}')
ax.set_xlabel('x'); ax.set_ylabel('y')
ax.legend()
ax = axes[1]
ax.plot(x_B, y_B, 'ko', markersize=6, label='data')
ax.plot(x_B, yp_B, 'b-', linewidth=2, label='linear fit')
ax.set_title(f'Case B: High MAE, High $R^2$\nMAE={mae_B:.1f}, $R^2$={r2_B:.4f}')
ax.set_xlabel('x'); ax.set_ylabel('y')
ax.legend()
plt.tight_layout()
plt.show()
Case A — Low MAE, Low R²
Data range : 9.952 – 10.046 (spread ≈ 0.094)
MAE = 0.0918 MSE = 0.009197 R² = -11.0804
Case B — High MAE, High R²
Data range : 47.9 – 10018.2 (spread ≈ 9970.3)
MAE = 21.6016 MSE = 721.01 R² = 0.9999
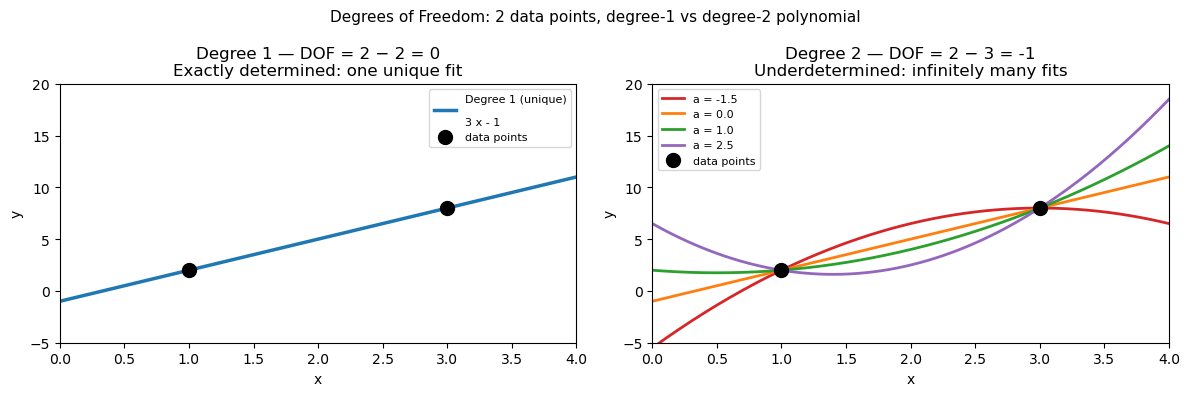
12.3.4 Degrees of Freedom in Polynomial Fitting#
Degrees of freedom (DOF) quantify how much “slack” a model has after satisfying all data constraints:
where \(N\) = number of data points and \(p\) = number of model parameters (coefficients).
1. Linear fit (degree 1)#
With \(N = 2\) data points:
DOF = 0 means the system is exactly determined — one unique line passes through both points, with zero residuals by construction.
2. Quadratic fit (degree 2)#
With \(N = 2\) data points:
DOF < 0 means the system is underdetermined — more parameters than constraints, so infinitely many quadratic curves pass through those two points. The fit is not unique.
General rule#
DOF |
Condition |
Meaning |
|---|---|---|
\(> 0\) |
\(N > p\) |
Overdetermined — least-squares finds the best compromise |
\(= 0\) |
\(N = p\) |
Exactly determined — perfect interpolation, unique solution |
\(< 0\) |
\(N < p\) |
Underdetermined — infinitely many solutions |
For polynomial fitting of physical data, you almost always want DOF \(\gg 0\): many more data points than coefficients. This is what makes the fit statistically meaningful — the polynomial is constrained by real data, not just solving a system of equations.
import numpy as np
import matplotlib.pyplot as plt
# Two data points
x_pts = np.array([1.0, 3.0])
y_pts = np.array([2.0, 8.0])
x_fine = np.linspace(0, 4, 200)
# ── Degree 1: DOF = 2 - 2 = 0 (unique solution) ─────────────────────────────
c1 = np.polyfit(x_pts, y_pts, 1) # one unique line
y1 = np.polyval(c1, x_fine)
# ── Degree 2: DOF = 2 - 3 = -1 (underdetermined — infinitely many solutions) ─
# np.polyfit returns ONE solution (minimum-norm), but infinitely many exist.
# We generate three more by varying the free parameter 'a' manually.
# y = a*x^2 + bx + c — with 2 equations and 3 unknowns,
# 'a' is free. Fix a, then solve for b and c.
def quadratic_through_two_points(x_pts, y_pts, a):
"""Given 'a', find b,c so that ax^2 + bx + c passes through both points."""
x1, x2 = x_pts
y1, y2 = y_pts
# y1 = a*x1^2 + b*x1 + c → b*x1 + c = y1 - a*x1^2
# y2 = a*x2^2 + b*x2 + c → b*x2 + c = y2 - a*x2^2
A = np.array([[x1, 1], [x2, 1]])
rhs = np.array([y1 - a*x1**2, y2 - a*x2**2])
b, c = np.linalg.solve(A, rhs)
return np.array([a, b, c])
a_values = [-1.5, 0.0, 1.0, 2.5] # four choices of the free parameter
colors_q = ['tab:red', 'tab:orange', 'tab:green', 'tab:purple']
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
# Left: degree 1 (unique)
ax = axes[0]
ax.plot(x_fine, y1, 'tab:blue', linewidth=2.5, label=f'Degree 1 (unique)\n{np.poly1d(c1)}')
ax.plot(x_pts, y_pts, 'ko', markersize=10, zorder=5, label='data points')
ax.set_title(f'Degree 1 — DOF = {len(x_pts)} − 2 = {len(x_pts)-2}\nExactly determined: one unique fit')
ax.set_xlabel('x'); ax.set_ylabel('y')
ax.set_xlim(0, 4); ax.set_ylim(-5, 20)
ax.legend(fontsize=8)
# Right: degree 2 (infinitely many)
ax = axes[1]
for a_val, col in zip(a_values, colors_q):
coeffs_q = quadratic_through_two_points(x_pts, y_pts, a_val)
ax.plot(x_fine, np.polyval(coeffs_q, x_fine), color=col,
linewidth=2, label=f'a = {a_val}')
ax.plot(x_pts, y_pts, 'ko', markersize=10, zorder=5, label='data points')
ax.set_title(f'Degree 2 — DOF = {len(x_pts)} − 3 = {len(x_pts)-3}\nUnderdetermined: infinitely many fits')
ax.set_xlabel('x'); ax.set_ylabel('y')
ax.set_xlim(0, 4); ax.set_ylim(-5, 20)
ax.legend(fontsize=8)
plt.suptitle('Degrees of Freedom: 2 data points, degree-1 vs degree-2 polynomial', fontsize=11)
plt.tight_layout()
plt.show()
print("Degree 1 (DOF = 0):")
print(f" Unique coefficients: {c1.round(4)}")
print()
print("Degree 2 (DOF = -1) — all four pass exactly through the same two points:")
for a_val in a_values:
c = quadratic_through_two_points(x_pts, y_pts, a_val)
print(f" a={a_val:+.1f} → coeffs = {c.round(4)} | check: p({x_pts[0]})={np.polyval(c, x_pts[0]):.1f}, p({x_pts[1]})={np.polyval(c, x_pts[1]):.1f}")
Degree 1 (DOF = 0):
Unique coefficients: [ 3. -1.]
Degree 2 (DOF = -1) — all four pass exactly through the same two points:
a=-1.5 → coeffs = [-1.5 9. -5.5] | check: p(1.0)=2.0, p(3.0)=8.0
a=+0.0 → coeffs = [ 0. 3. -1.] | check: p(1.0)=2.0, p(3.0)=8.0
a=+1.0 → coeffs = [ 1. -1. 2.] | check: p(1.0)=2.0, p(3.0)=8.0
a=+2.5 → coeffs = [ 2.5 -7. 6.5] | check: p(1.0)=2.0, p(3.0)=8.0
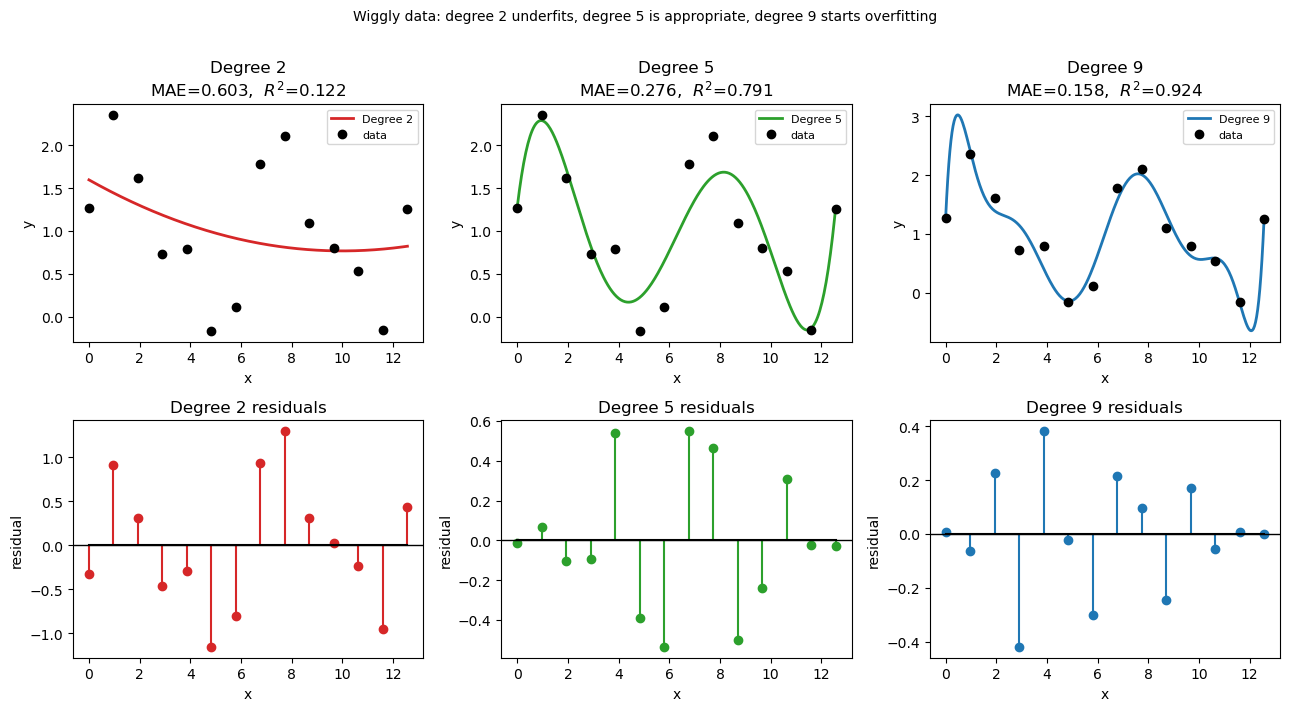
12.3.5 Overfitting: When Higher Degree Hurts#
Adding more polynomial terms always reduces training error, but can create overfitting: the polynomial wiggles between data points and performs poorly outside the training range.
Why does adding terms always reduce training error? With \(N\) data points and a degree-\((N-1)\) polynomial, you have exactly enough free coefficients to pass through every point perfectly — residuals become zero by construction. But this is not a good model; it has memorized the noise in the data rather than learned the underlying trend.
Degrees of freedom = number of adjustable parameters (coefficients) available to fit the data. A degree-\(n\) polynomial has \(n+1\) coefficients, so \(n+1\) degrees of freedom.
Degree |
Degrees of freedom |
Behavior |
|---|---|---|
High (\(N-1\)) |
\(N\) — one per data point |
Zero training error · High variance · Overfitting risk |
Low–moderate |
\(\ll N\) |
Nonzero residual · Better generalization · Controlled flexibility |
The bias-variance tradeoff:
A low-degree polynomial is too rigid — it misses real structure in the data
A high-degree polynomial is too flexible — it chases every fluctuation and noise spike
The right degree sits in between: flexible enough to capture the physical trend, not so flexible that it fits the noise. A practical warning sign: if the polynomial behaves wildly between data points or shoots off just outside the data range, the degree is too high.
Here we deliberately use degree 9 (with only 10 data points) to illustrate the problem.
import numpy as np
import matplotlib.pyplot as plt
# ── Wiggly dataset: a signal with genuine oscillations + small noise ──────────
# Imagine a periodic reaction yield measured across 12 experimental conditions.
np.random.seed(3)
x_wig = np.linspace(0, 4 * np.pi, 14)
y_wig = np.sin(x_wig) + 0.5 * np.sin(2 * x_wig) + np.random.normal(1, 0.15, 14) # np.sin(x_wig) + 0.5 * np.sin(2 * x_wig) +
x_fine = np.linspace(0, 4 * np.pi, 300)
# Fit with degree 2, 5, and 9
degs = [2, 5, 9]
colors = ['tab:red', 'tab:green', 'tab:blue']
fits_w = {d: np.polyfit(x_wig, y_wig, d) for d in degs}
# ── Metrics ───────────────────────────────────────────────────────────────────
SS_tot_w = np.sum((y_wig - np.mean(y_wig))**2)
print(f"{'Degree':>6} {'MAE':>10} {'R²':>8} {'Note'}")
print("-" * 48)
notes = {2: 'underfit — misses oscillations',
5: 'good fit — captures structure',
9: 'starts to overfit noise'}
for d in degs:
pred = np.polyval(fits_w[d], x_wig)
res = y_wig - pred
mae = np.mean(np.abs(res))
r2 = 1 - np.sum(res**2) / SS_tot_w
print(f"{d:>6} {mae:>10.4f} {r2:>8.4f} {notes[d]}")
# ── Plot: fits ────────────────────────────────────────────────────────────────
fig, axes = plt.subplots(2, 3, figsize=(13, 7))
for col, (d, color) in enumerate(zip(degs, colors)):
y_pred_fine = np.polyval(fits_w[d], x_fine)
y_pred_data = np.polyval(fits_w[d], x_wig)
residuals = y_wig - y_pred_data
mae = np.mean(np.abs(residuals))
r2 = 1 - np.sum(residuals**2) / SS_tot_w
# Top row: fit vs data
ax = axes[0, col]
ax.plot(x_fine, y_pred_fine, color=color, linewidth=2, label=f'Degree {d}')
ax.plot(x_wig, y_wig, 'ko', markersize=6, zorder=5, label='data')
ax.set_title(f'Degree {d}\nMAE={mae:.3f}, $R^2$={r2:.3f}')
ax.set_xlabel('x'); ax.set_ylabel('y')
ax.legend(fontsize=8)
# Bottom row: residuals
ax = axes[1, col]
ax.stem(x_wig, residuals, linefmt=color, markerfmt='o', basefmt='k-')
ax.axhline(0, color='k', linewidth=1)
ax.set_title(f'Degree {d} residuals')
ax.set_xlabel('x'); ax.set_ylabel('residual')
plt.suptitle('Wiggly data: degree 2 underfits, degree 5 is appropriate, degree 9 starts overfitting',
fontsize=10, y=1.01)
plt.tight_layout()
plt.show()
Degree MAE R² Note
------------------------------------------------
2 0.6030 0.1219 underfit — misses oscillations
5 0.2763 0.7914 good fit — captures structure
9 0.1583 0.9236 starts to overfit noise
# ── Overfitting demonstration ─────────────────────────────────────────────────
coeffs_deg3 = np.polyfit(T_data, Cp_data, 3)
coeffs_deg9 = np.polyfit(T_data, Cp_data, 9)
T_ext = np.linspace(200, 1300, 400) # extend beyond the data range
fig, ax = plt.subplots(figsize=(9, 4))
ax.plot(T_data, Cp_data, 'ko', markersize=7, zorder=5, label='NIST data')
ax.plot(T_ext, np.polyval(coeffs_deg3, T_ext),
'tab:blue', linewidth=2, label='Degree 3 (good fit)')
ax.plot(T_ext, np.polyval(coeffs_deg9, T_ext),
'tab:red', linewidth=2, linestyle='--', label='Degree 9 (overfit)')
ax.set_ylim(30, 80)
ax.set_xlabel('Temperature (K)')
ax.set_ylabel(r'$C_p$ (J mol$^{-1}$ K$^{-1}$)')
ax.set_title('Overfitting: degree-9 polynomial fits training data perfectly but extrapolates badly')
ax.legend()
plt.tight_layout()
plt.show()
print("Lesson: For smooth physical data, a low-degree polynomial (2-4) is usually best.")
print("Use R² and visual inspection — not just training error — to choose degree.")
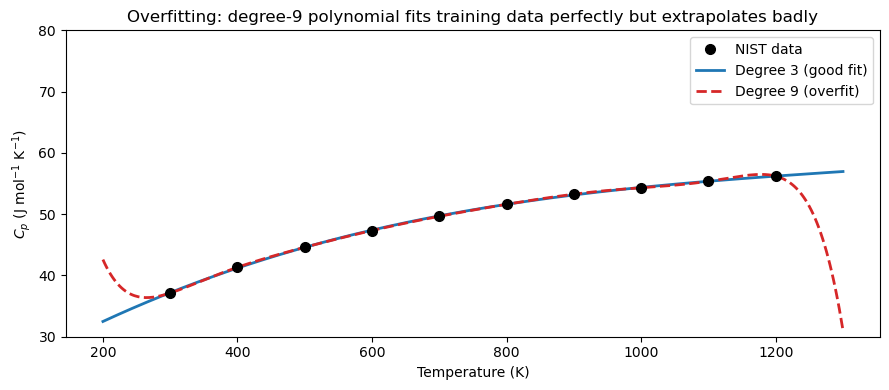
Lesson: For smooth physical data, a low-degree polynomial (2-4) is usually best.
Use R² and visual inspection — not just training error — to choose degree.
12.4 Summary#
Concept |
Tool / Formula |
When to use |
|---|---|---|
Polynomial evaluation |
|
Evaluate a stored coefficient array at \(x\) |
Polynomial object |
|
Callable; |
Least-squares fit |
|
Fit noisy or tabulated data; keep degree small |
Residuals |
\(e_i = y_i - p(x_i)\) |
Signed error at each data point |
MAE |
\(\frac{1}{N}\sum|e_i|\) |
Average error in original units; easy to interpret |
MSE |
\(\frac{1}{N}\sum e_i^2\) |
Penalizes large errors; units are \(y^2\) |
\(R^2\) |
\(1 - \sum e_i^2 / \sum(y_i-\bar{y})^2\) |
Fraction of variance explained; 1 = perfect |