Chapter 15: Numerical Integration and Differentiation#
Topics Covered:
Numerical differentiation with
np.gradientTrapezoidal rule:
scipy.integrate.trapezoidGeneral-purpose quadrature:
scipy.integrate.quadCumulative integration:
scipy.integrate.cumulative_trapezoidChE application: PFR design and the Levenspiel integral
Motivation: Two Problems You Can’t Solve by Hand#
Problem 1 — How much heat does it take?
The heat capacity of nitrogen gas is not constant — it varies with temperature. To heat 1 mol of N₂ from 300 K to 1200 K, you need:
where \(C_p(T)\) follows the NIST Shomate equation. You could try to integrate this polynomial by hand, but what if your \(C_p\) data comes from a table of measurements rather than a formula?
Problem 2 — What is the reaction rate at each time step?
In a batch reactor experiment, you measure concentration \(C_A\) at discrete time points. The reaction rate is: $\(r_A = -\frac{dC_A}{dt}\)$
But you don’t have a formula for \(C_A(t)\) — only a table of numbers. How do you compute a derivative from data?
Both problems need numerical methods. Let’s look at the tools Python gives us.
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import quad, trapezoid, cumulative_trapezoid
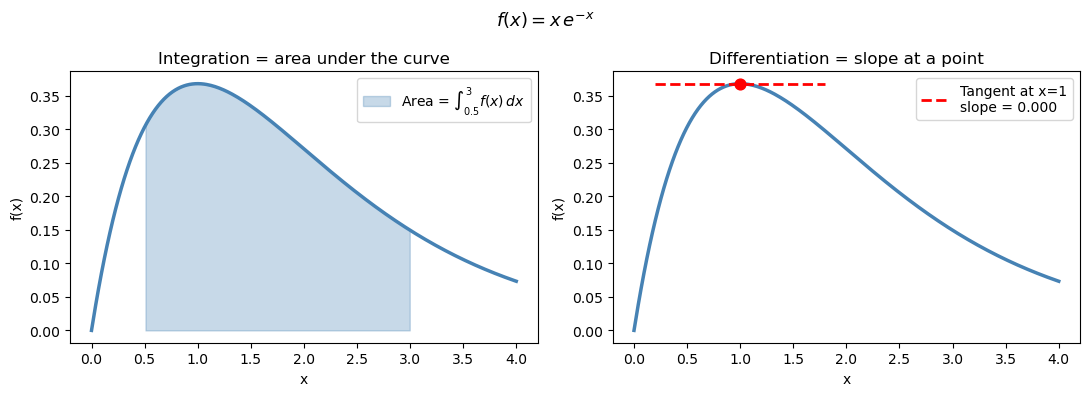
15.1 The Core Idea: Integration and Differentiation Geometrically#
Before writing any code, let’s make the geometry clear.
Integration = the area under a curve between two limits
Differentiation = the slope of a curve at a point
When you have a smooth analytic function, calculus gives exact answers. When you have discrete data or a complicated expression, you use numerical approximations instead.
x = np.linspace(0, 4, 300)
f = x * np.exp(-x)
fig, axes = plt.subplots(1, 2, figsize=(11, 4))
# Left: integration = area under curve
ax = axes[0]
ax.plot(x, f, 'steelblue', linewidth=2.5)
mask = (x >= 0.5) & (x <= 3.0)
ax.fill_between(x[mask], f[mask], alpha=0.3, color='steelblue', label=r'Area = $\int_{0.5}^{3} f(x)\,dx$')
ax.set_xlabel('x'); ax.set_ylabel('f(x)')
ax.set_title('Integration = area under the curve')
ax.legend(fontsize=10)
# Right: differentiation = slope at a point
ax = axes[1]
ax.plot(x, f, 'steelblue', linewidth=2.5)
x0 = 1.0
f0 = x0 * np.exp(-x0)
dfdx0 = np.exp(-x0) - x0 * np.exp(-x0) # exact derivative: e^{-x}(1-x)
x_tan = np.linspace(0.2, 1.8, 50)
ax.plot(x_tan, f0 + dfdx0 * (x_tan - x0), 'r--', linewidth=2, label=f"Tangent at x=1\nslope = {dfdx0:.3f}")
ax.scatter([x0], [f0], color='red', s=60, zorder=5)
ax.set_xlabel('x'); ax.set_ylabel('f(x)')
ax.set_title('Differentiation = slope at a point')
ax.legend(fontsize=10)
plt.suptitle(r'$f(x) = x\,e^{-x}$', fontsize=13)
plt.tight_layout()
plt.show()
15.2 Numerical Differentiation: np.gradient#
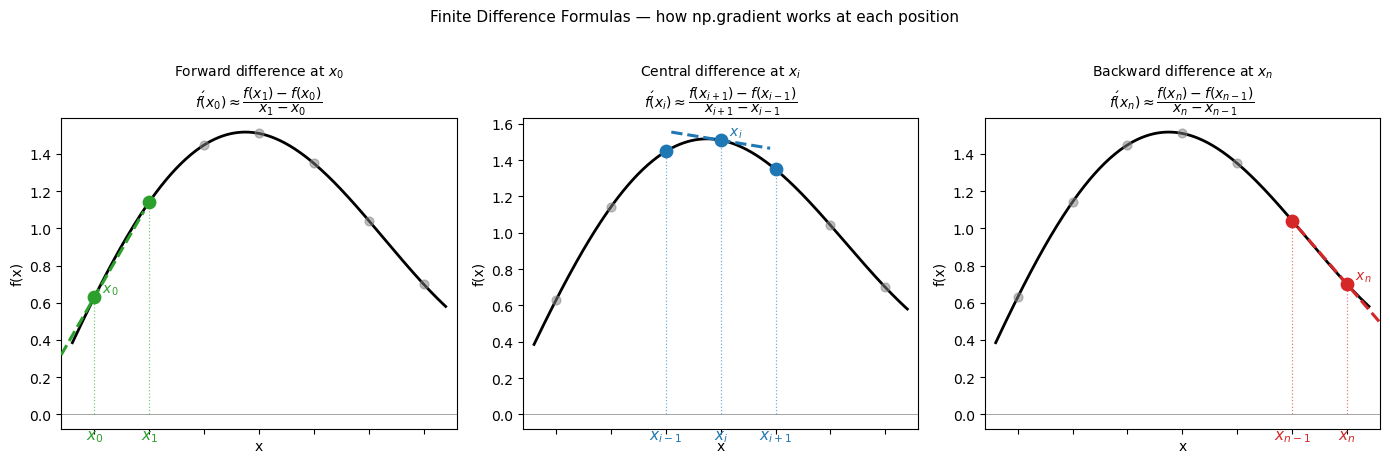
The mathematics: finite difference formulas#
A derivative is defined by the limit: $\(f'(x) = \lim_{\Delta x \to 0} \frac{f(x + \Delta x) - f(x)}{\Delta x}\)$
When you only have data at discrete points \(x_0, x_1, \ldots, x_n\), you can’t take the limit — but you can approximate it using nearby values. These approximations are called finite difference formulas.
Central difference (used at interior points — most accurate): $\(f'(x_i) \approx \frac{f(x_{i+1}) - f(x_{i-1})}{x_{i+1} - x_{i-1}}\)$
This is second-order accurate: the error shrinks like \((\Delta x)^2\). It uses symmetric information on both sides of \(x_i\).
Forward difference (used at the left endpoint, where no left neighbor exists): $\(f'(x_0) \approx \frac{f(x_1) - f(x_0)}{x_1 - x_0}\)$
Backward difference (used at the right endpoint, where no right neighbor exists): $\(f'(x_n) \approx \frac{f(x_n) - f(x_{n-1})}{x_n - x_{n-1}}\)$
The forward and backward formulas are only first-order accurate — the error shrinks like \(\Delta x\), not \((\Delta x)^2\). This is why numerical derivatives are slightly less accurate at the endpoints.
np.gradient applies these three formulas automatically and returns one derivative value per data point — the output array is the same length as the input.
Key Python syntax#
dydx = np.gradient(y, x)
y— array of function values (what you measured)x— array of corresponding \(x\) positions; always pass this when your \(x\)-spacing is not 1Returns — array of the same length as
y, one \(dy/dx\) value per point
Warning
If you write np.gradient(y) without x, NumPy assumes unit spacing (\(\Delta x = 1\)). The result is wrong whenever your data has physical units like seconds or Kelvin.
# Visualize: Forward, Backward, and Central Difference formulas
# on a small discrete dataset, labeling x_0, x_1, x_{i-1}, x_i, x_{i+1}, x_{n-1}, x_n
# Use a smooth function sampled at a handful of points
x_pts = np.linspace(0.5, 3.5, 7) # x_0 … x_n (n=6)
f_pts = np.sin(x_pts) + 0.3 * x_pts # arbitrary smooth function
x_fine = np.linspace(0.3, 3.7, 300)
f_fine = np.sin(x_fine) + 0.3 * x_fine
# Pick a representative interior index i = 3
i = 3
# ---------- slope line helpers ----------
def tangent_segment(x0, y0, slope, half_width=0.35):
xs = np.array([x0 - half_width, x0 + half_width])
ys = y0 + slope * (xs - x0)
return xs, ys
# Forward difference at x_0
fwd_slope = (f_pts[1] - f_pts[0]) / (x_pts[1] - x_pts[0])
# Backward difference at x_n
bwd_slope = (f_pts[-1] - f_pts[-2]) / (x_pts[-1] - x_pts[-2])
# Central difference at x_i
cen_slope = (f_pts[i+1] - f_pts[i-1]) / (x_pts[i+1] - x_pts[i-1])
fig, axes = plt.subplots(1, 3, figsize=(14, 4.5), sharey=False)
titles = [
r'Forward difference at $x_0$' + '\n'
r'$f\'(x_0)\approx\dfrac{f(x_1)-f(x_0)}{x_1-x_0}$',
r'Central difference at $x_i$' + '\n'
r'$f\'(x_i)\approx\dfrac{f(x_{i+1})-f(x_{i-1})}{x_{i+1}-x_{i-1}}$',
r'Backward difference at $x_n$' + '\n'
r'$f\'(x_n)\approx\dfrac{f(x_n)-f(x_{n-1})}{x_n-x_{n-1}}$',
]
configs = [
# (focus_idx, left_idx, right_idx, slope, color)
(0, None, 1, fwd_slope, 'tab:green'),
(i, i-1, i+1, cen_slope, 'tab:blue'),
(-1, -2, None, bwd_slope, 'tab:red'),
]
# label map: index -> LaTeX label
def get_label(idx, n=6):
mapping = {0: r'$x_0$', 1: r'$x_1$', n-1: r'$x_{n-1}$', n: r'$x_n$'}
return mapping.get(idx, None)
for ax, title, (fi, li, ri, slope, color) in zip(axes, titles, configs):
ax.plot(x_fine, f_fine, 'k-', linewidth=2, zorder=1)
ax.scatter(x_pts, f_pts, color='gray', s=40, zorder=3, alpha=0.5)
focus_x = x_pts[fi]
focus_y = f_pts[fi]
# highlight the points used in the formula
used_idx = [idx for idx in [li, fi, ri] if idx is not None]
ax.scatter(x_pts[used_idx], f_pts[used_idx], color=color, s=80, zorder=5)
# draw the secant / slope line
xs_t, ys_t = tangent_segment(focus_x, focus_y, slope, half_width=0.45)
ax.plot(xs_t, ys_t, color=color, linewidth=2.2, linestyle='--', label='approx slope', zorder=4)
# vertical dashed lines to x-axis for used points
for idx in used_idx:
ax.plot([x_pts[idx], x_pts[idx]], [0, f_pts[idx]],
color=color, linewidth=0.9, linestyle=':', alpha=0.6)
# annotate x-axis tick labels
n = len(x_pts) - 1 # n = 6
label_map = {0: r'$x_0$', 1: r'$x_1$',
i-1: r'$x_{i-1}$', i: r'$x_i$', i+1: r'$x_{i+1}$',
n-1: r'$x_{n-1}$', n: r'$x_n$'}
for idx in used_idx:
raw = idx if idx >= 0 else n + 1 + idx # convert negative index
lbl = label_map.get(raw, None)
if lbl:
ax.annotate(lbl, xy=(x_pts[idx], 0),
xytext=(0, -18), textcoords='offset points',
ha='center', fontsize=11, color=color)
# annotate the focus point on the curve
raw_fi = fi if fi >= 0 else n + 1 + fi
focus_lbl = label_map.get(raw_fi, r'$x_i$')
ax.annotate(f' {focus_lbl}', xy=(focus_x, focus_y),
fontsize=10, color=color, va='bottom')
ax.set_title(title, fontsize=10, pad=8)
ax.set_xlabel('x')
ax.set_ylabel('f(x)')
ax.set_xlim(0.2, 3.8)
ax.axhline(0, color='gray', linewidth=0.5)
ax.tick_params(labelbottom=False) # hide numeric ticks; we use latex labels
plt.suptitle('Finite Difference Formulas — how np.gradient works at each position',
fontsize=11, y=1.02)
plt.tight_layout()
plt.savefig('finite_difference_formulas.png', dpi=300, bbox_inches='tight')
plt.show()
Syntax Practice: np.gradient#
Before verifying on a known function, try the syntax yourself on a simple dataset.
Given position data sampled every 0.5 seconds:
\(t\) (s) |
0.0 |
0.5 |
1.0 |
1.5 |
2.0 |
|---|---|---|---|---|---|
\(x\) (m) |
0.0 |
1.2 |
2.1 |
2.7 |
3.0 |
Task: Compute the velocity \(v = dx/dt\) at each time point using np.gradient.
t = np.array([0.0, 0.5, 1.0, 1.5, 2.0])
x = np.array([0.0, 1.2, 2.1, 2.7, 3.0])
# Your turn: compute v = dx/dt at every point
v = np.gradient(???, ???)
print("t (s):", t)
print("v (m/s):", v)
Notice:
v[0]uses the forward formula (\(x_0, x_1\))v[1],v[2],v[3]use the central formulav[-1]uses the backward formula (\(x_{n-1}, x_n\))
t = np.array([0.0, 0.5, 1.0, 1.5, 2.0])
x = np.array([0.0, 1.2, 2.1, 2.7, 3.0])
# Compute v = dx/dt at every point
v = np.gradient(x, t)
print("t (s):", t)
print("v (m/s):", np.round(v, 4))
# Which formula was used at each point?
print("\nFormula used:")
print(f" v[0] = (x[1]-x[0])/(t[1]-t[0]) = {(x[1]-x[0])/(t[1]-t[0]):.4f} ← forward")
print(f" v[2] = (x[3]-x[1])/(t[3]-t[1]) = {(x[3]-x[1])/(t[3]-t[1]):.4f} ← central")
print(f" v[-1] = (x[-1]-x[-2])/(t[-1]-t[-2]) = {(x[-1]-x[-2])/(t[-1]-t[-2]):.4f} ← backward")
t (s): [0. 0.5 1. 1.5 2. ]
v (m/s): [2.4 2.1 1.5 0.9 0.6]
Formula used:
v[0] = (x[1]-x[0])/(t[1]-t[0]) = 2.4000 ← forward
v[2] = (x[3]-x[1])/(t[3]-t[1]) = 1.5000 ← central
v[-1] = (x[-1]-x[-2])/(t[-1]-t[-2]) = 0.6000 ← backward
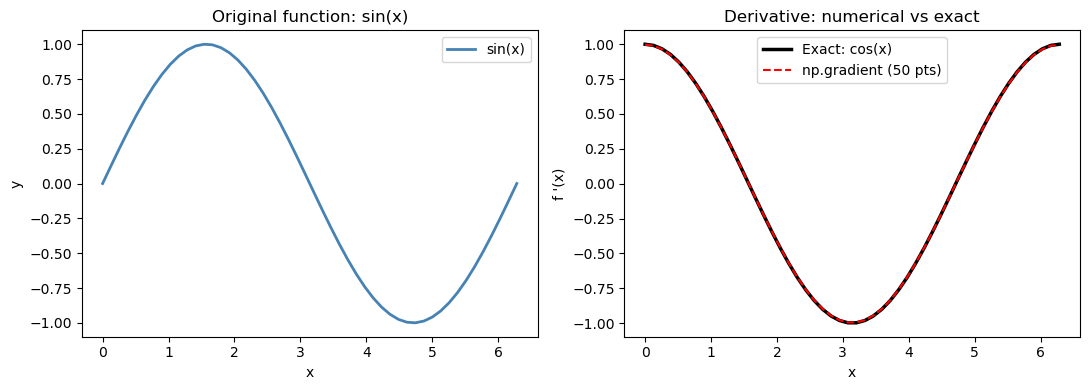
15.2.1 Verification on a known function#
Let’s check np.gradient against the exact derivative of \(\sin(x)\) (which is \(\cos(x)\)).
For a uniform grid with spacing \(h\), the central difference error is proportional to \(h^2 f'''(x)/6\). With 50 points over \([0, 2\pi]\), \(h \approx 0.13\), so we expect the max error to be on the order of \(h^2 \approx 0.017\) — consistent with what we observe below.
x_sin = np.linspace(0, 2 * np.pi, 50)
y_sin = np.sin(x_sin)
# Numerical derivative
dy_num = np.gradient(y_sin, x_sin)
# Exact derivative
dy_exact = np.cos(x_sin)
max_error = np.max(np.abs(dy_num - dy_exact))
print(f"Max absolute error vs exact cos(x): {max_error:.2e}")
fig, axes = plt.subplots(1, 2, figsize=(11, 4))
ax = axes[0]
ax.plot(x_sin, y_sin, 'steelblue', linewidth=2, label='sin(x)')
ax.set_xlabel('x'); ax.set_ylabel('y')
ax.set_title('Original function: sin(x)')
ax.legend()
ax = axes[1]
ax.plot(x_sin, dy_exact, 'k-', linewidth=2.5, label='Exact: cos(x)')
ax.plot(x_sin, dy_num, 'r--', linewidth=1.5, label='np.gradient (50 pts)')
ax.set_xlabel('x'); ax.set_ylabel("f '(x)")
ax.set_title('Derivative: numerical vs exact')
ax.legend()
plt.tight_layout()
plt.show()
Max absolute error vs exact cos(x): 2.74e-03
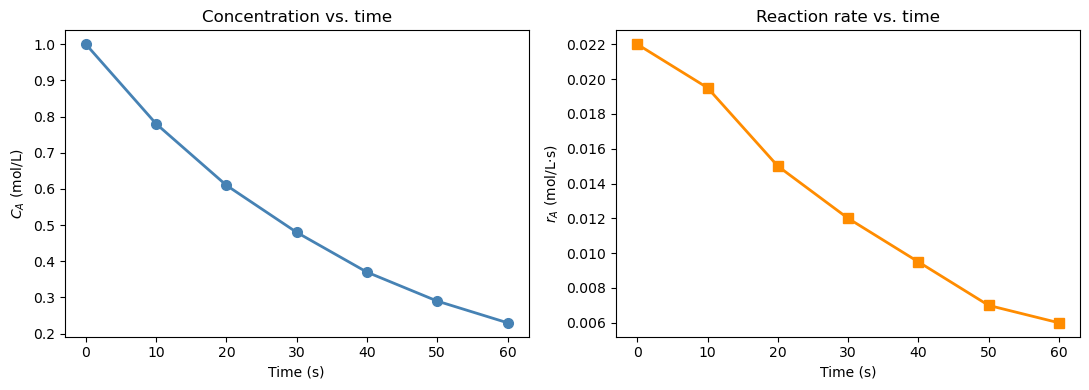
15.2.2 Reaction rate from concentration data#
In a batch reactor experiment, \(C_A\) is measured at discrete time points. The reaction rate of disappearance of A is defined as: $\(r_A = -\frac{dC_A}{dt}\)$
The negative sign converts the decrease in concentration into a positive rate. We only have a table of numbers — no formula for \(C_A(t)\) — so np.gradient is the right tool.
Notice how np.gradient applies the central difference at interior points and the one-sided (forward/backward) difference at the two endpoints \(t=0\) and \(t=60\). You can verify this in the printed table: the values at the boundaries use only one neighbor.
t = np.array([0, 10, 20, 30, 40, 50, 60 ]) # s
C_A = np.array([1.00, 0.78, 0.61, 0.48, 0.37, 0.29, 0.23]) # mol/L
# Reaction rate: r_A = -dC_A/dt
# IMPORTANT: pass t as the second argument — spacing is 10 s, not 1
r_A = -np.gradient(C_A, t)
print(f"{'t (s)':>6} {'C_A (mol/L)':>12} {'r_A (mol/L·s)':>14}")
print("-" * 38)
for i in range(len(t)):
print(f" {t[i]:>4.0f} {C_A[i]:>12.3f} {r_A[i]:>14.5f}")
fig, axes = plt.subplots(1, 2, figsize=(11, 4))
ax = axes[0]
ax.plot(t, C_A, 'o-', color='steelblue', linewidth=2, markersize=7)
ax.set_xlabel('Time (s)'); ax.set_ylabel('$C_A$ (mol/L)')
ax.set_title('Concentration vs. time')
ax = axes[1]
ax.plot(t, r_A, 's-', color='darkorange', linewidth=2, markersize=7)
ax.set_xlabel('Time (s)'); ax.set_ylabel('$r_A$ (mol/L·s)')
ax.set_title('Reaction rate vs. time')
plt.tight_layout()
plt.show()
t (s) C_A (mol/L) r_A (mol/L·s)
--------------------------------------
0 1.000 0.02200
10 0.780 0.01950
20 0.610 0.01500
30 0.480 0.01200
40 0.370 0.00950
50 0.290 0.00700
60 0.230 0.00600
15.3 Numerical Integration of Discrete Data: Trapezoidal Rule#
The mathematics: deriving the formula#
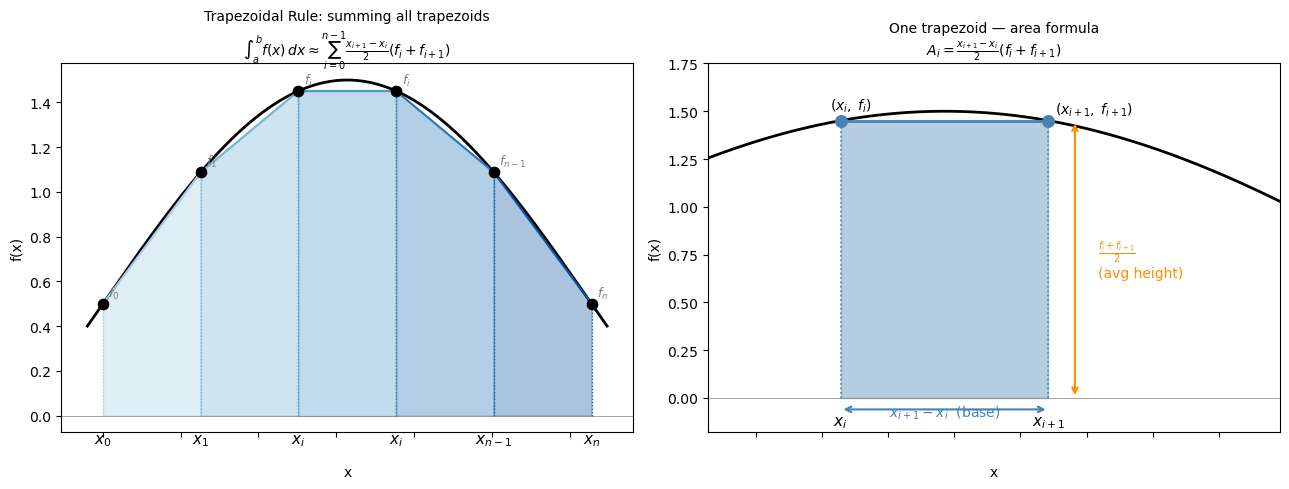
The trapezoidal rule approximates the area under a curve by connecting adjacent data points with straight lines and summing the resulting trapezoid areas.
For two adjacent points \((x_i, f_i)\) and \((x_{i+1}, f_{i+1})\), the area of the trapezoid is: $\(A_i = (x_{i+1} - x_i)\bigl(\frac{f_i + f_{i+1}}{2}\bigr)\)$
This is just the base times the average height. Summing over all \(n-1\) intervals: $\(\int_a^b f(x)\,dx \approx \sum_{i=0}^{n-2} (x_{i+1} - x_i)\bigl(\frac{f_i + f_{i+1}}{2}\bigr)\)$
For a uniform grid with spacing \(h = (b-a)/(n-1)\), this simplifies to: $\(\int_a^b f(x)\,dx \approx h\left[\frac{f_0}{2} + f_1 + f_2 + \cdots + f_{n-2} + \frac{f_{n-1}}{2}\right]\)$
The endpoints are weighted by \(\frac{1}{2}\) because each endpoint belongs to only one trapezoid, while interior points are shared between two.
Truncation error: The trapezoidal rule is second-order accurate — for a uniform grid, the global error is: $\(\text{Error} \approx -\frac{(b-a)^2}{12n^2}\,\bigl[f'(b) - f'(a)\bigr] \sim \mathcal{O}(h^2)\)$
Doubling the number of points reduces the error by a factor of 4.
Key Python syntax#
from scipy.integrate import trapezoid
area = trapezoid(y, x)
y— array of function values at the sample pointsx— array of corresponding \(x\) positions; always pass this with physical unitsReturns — a single float: \(\int y\, dx\)
Warning
trapezoid(y) without x assumes unit spacing (\(\Delta x = 1\)) — wrong whenever your \(x\)-axis has units.
# Visualize the trapezoidal rule formula on a general dataset
# Shows: area = (x_{i+1} - x_i) / 2 * (f_i + f_{i+1}) for each trapezoid
x_trap_vis = np.linspace(0, np.pi, 6) # x_0 … x_n (n=5, 6 points)
f_trap_vis = np.sin(x_trap_vis) + 0.5 # arbitrary positive function
x_fine_vis = np.linspace(-0.1, np.pi + 0.1, 400)
f_fine_vis = np.sin(x_fine_vis) + 0.5
n = len(x_trap_vis) - 1 # number of intervals
fig, axes = plt.subplots(1, 2, figsize=(13, 5))
# ── Left panel: full trapezoidal sum with labeled points ──────────────────────
ax = axes[0]
ax.plot(x_fine_vis, f_fine_vis, 'k-', linewidth=2, zorder=2, label='f(x)')
colors = plt.cm.Blues(np.linspace(0.35, 0.85, n))
for i in range(n):
xi, fi = x_trap_vis[i], f_trap_vis[i]
xi1, fi1 = x_trap_vis[i+1], f_trap_vis[i+1]
ax.fill_between([xi, xi1], [fi, fi1], alpha=0.35, color=colors[i], zorder=1)
ax.plot([xi, xi1], [fi, fi1], color=colors[i], linewidth=1.5)
ax.plot([xi, xi], [0, fi], color=colors[i], linewidth=0.9, linestyle=':')
ax.plot([xi1, xi1], [0, fi1], color=colors[i], linewidth=0.9, linestyle=':')
ax.scatter(x_trap_vis, f_trap_vis, color='black', s=55, zorder=5)
x_labels = {0: r'$x_0$', 1: r'$x_1$', n-1: r'$x_{n-1}$', n: r'$x_n$'}
f_labels = {0: r'$f_0$', 1: r'$f_1$', n-1: r'$f_{n-1}$', n: r'$f_n$'}
for j, (xv, fv) in enumerate(zip(x_trap_vis, f_trap_vis)):
ax.annotate(x_labels.get(j, r'$x_i$'), xy=(xv, 0), xytext=(0, -20),
textcoords='offset points', ha='center', fontsize=11)
ax.annotate(f_labels.get(j, r'$f_i$'), xy=(xv, fv), xytext=(4, 5),
textcoords='offset points', fontsize=9, color='gray')
ax.axhline(0, color='gray', linewidth=0.5)
ax.tick_params(labelbottom=False)
ax.set_xlabel('x', labelpad=20)
ax.set_ylabel('f(x)')
ax.set_title(
'Trapezoidal Rule: summing all trapezoids\n'
r'$\int_a^b f(x)\,dx \approx \sum_{i=0}^{n-1}'
r'\frac{x_{i+1}-x_i}{2}(f_i + f_{i+1})$',
fontsize=10
)
# ── Right panel: zoom into ONE trapezoid, labeling the formula pieces ─────────
ax2 = axes[1]
ax2.plot(x_fine_vis, f_fine_vis, 'k-', linewidth=2, zorder=2)
i_show = 2
xi, fi = x_trap_vis[i_show], f_trap_vis[i_show]
xi1, fi1 = x_trap_vis[i_show+1], f_trap_vis[i_show+1]
ax2.fill_between([xi, xi1], [fi, fi1], alpha=0.4, color='steelblue', zorder=1)
ax2.plot([xi, xi1], [fi, fi1], 'steelblue', linewidth=2)
ax2.plot([xi, xi], [0, fi], 'steelblue', linewidth=1.2, linestyle=':')
ax2.plot([xi1, xi1], [0, fi1], 'steelblue', linewidth=1.2, linestyle=':')
ax2.scatter([xi, xi1], [fi, fi1], color='steelblue', s=70, zorder=5)
# double-headed arrow for base width
mid_x = (xi + xi1) / 2
ax2.annotate('', xy=(xi1, -0.06), xytext=(xi, -0.06),
arrowprops=dict(arrowstyle='<->', color='steelblue', lw=1.5))
ax2.text(mid_x, -0.10, r'$x_{i+1} - x_i$ (base)', ha='center',
fontsize=10, color='steelblue')
# average height label
avg_h = (fi + fi1) / 2
ax2.annotate('', xy=(xi1 + 0.08, avg_h), xytext=(xi1 + 0.08, 0),
arrowprops=dict(arrowstyle='<->', color='darkorange', lw=1.5))
ax2.text(xi1 + 0.15, avg_h / 2,
r'$\frac{f_i + f_{i+1}}{2}$' + '\n(avg height)',
ha='left', va='center', fontsize=10, color='darkorange')
ax2.annotate(r'$(x_i,\; f_i)$', xy=(xi, fi), xytext=(-8, 8), textcoords='offset points', fontsize=10)
ax2.annotate(r'$(x_{i+1},\; f_{i+1})$', xy=(xi1, fi1), xytext=(5, 5), textcoords='offset points', fontsize=10)
ax2.annotate(r'$x_i$', xy=(xi, 0), xytext=(0, -20), textcoords='offset points', ha='center', fontsize=11)
ax2.annotate(r'$x_{i+1}$', xy=(xi1, 0), xytext=(0, -20), textcoords='offset points', ha='center', fontsize=11)
ax2.axhline(0, color='gray', linewidth=0.5)
ax2.tick_params(labelbottom=False)
ax2.set_xlabel('x', labelpad=20)
ax2.set_ylabel('f(x)')
ax2.set_title(
'One trapezoid — area formula\n'
r'$A_i = \frac{x_{i+1}-x_i}{2}(f_i + f_{i+1})$',
fontsize=10
)
ax2.set_xlim(xi - 0.4, xi1 + 0.7)
ax2.set_ylim(-0.18, max(fi, fi1) + 0.3)
plt.tight_layout()
plt.show()
15.3.1 Building intuition: visualizing trapezoids#
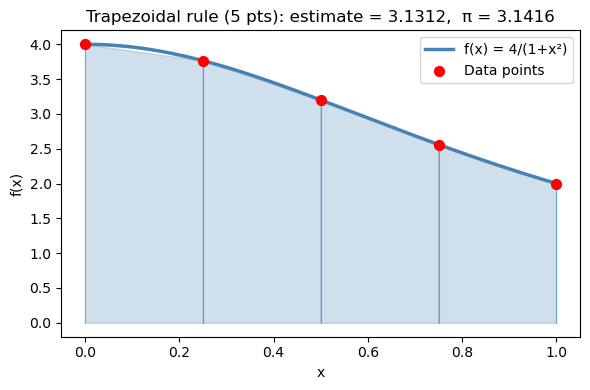
Let’s integrate \(f(x) = \dfrac{4}{1+x^2}\) from 0 to 1 using only 5 points so the trapezoids are clearly visible.
The exact answer is \(\pi\) — you can verify this using the substitution \(x = \tan\theta\): $\(\int_0^1 \frac{4}{1+x^2}\,dx = 4\arctan(x)\Big|_0^1 = 4\left(\frac{\pi}{4} - 0\right) = \pi\)$
With only 5 points (\(h = 0.25\)), we expect an error of roughly \(\mathcal{O}(h^2) = \mathcal{O}(0.0625)\). Observe how the straight-line segments cut corners off the curved function — that gap is the truncation error.
def f_pi(x):
return 4.0 / (1.0 + x**2)
# N-point trapezoidal approximation
N = 5
x_trap = np.linspace(0, 1, N)
y_trap = f_pi(x_trap)
area_trap = trapezoid(y_trap, x_trap)
print(f"{N}-point trapezoidal estimate: {area_trap:.6f}")
print(f"True value (π): {np.pi:.6f}")
print(f"Error: {abs(area_trap - np.pi):.6f}")
# Visualize
x_fine = np.linspace(0, 1, 300)
fig, ax = plt.subplots(figsize=(6, 4))
ax.plot(x_fine, f_pi(x_fine), 'steelblue', linewidth=2.5, label='f(x) = 4/(1+x²)', zorder=3)
for i in range(len(x_trap) - 1):
ax.fill_between([x_trap[i], x_trap[i+1]],
[y_trap[i], y_trap[i+1]], alpha=0.25, color='steelblue')
ax.plot([x_trap[i], x_trap[i]], [0, y_trap[i]], 'steelblue', linewidth=0.8, alpha=0.5)
ax.plot([x_trap[-1], x_trap[-1]], [0, y_trap[-1]], 'steelblue', linewidth=0.8, alpha=0.5)
ax.scatter(x_trap, y_trap, color='red', s=50, zorder=5, label='Data points')
ax.set_xlabel('x'); ax.set_ylabel('f(x)')
ax.set_title(f'Trapezoidal rule ({N} pts): estimate = {area_trap:.4f}, π = {np.pi:.4f}')
ax.legend()
plt.tight_layout()
plt.show()
5-point trapezoidal estimate: 3.131176
True value (π): 3.141593
Error: 0.010416
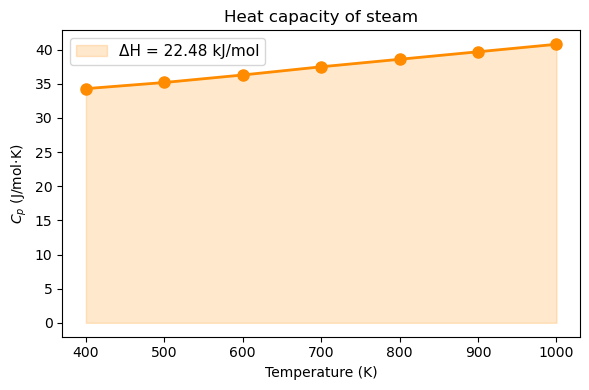
15.3.2 Heat required from tabulated \(C_p\) data#
A steam process requires heating from 400 K to 1000 K. Given tabulated heat capacity data: $\(\Delta H = \int_{400}^{1000} C_p(T) \, dT\)$
from scipy.integrate import trapezoid
# Tabulated Cp data for steam (J/mol·K) — 7 measurement points
T_data = np.array([400, 500, 600, 700, 800, 900, 1000]) # K
Cp_data = np.array([34.3, 35.2, 36.3, 37.5, 38.6, 39.7, 40.8]) # J/mol·K
delta_H = trapezoid(Cp_data, T_data) # J/mol
print(f"ΔH = ∫Cp dT = {delta_H:.1f} J/mol = {delta_H/1000:.3f} kJ/mol")
fig, ax = plt.subplots(figsize=(6, 4))
ax.plot(T_data, Cp_data, 'o-', color='darkorange', linewidth=2, markersize=8)
ax.fill_between(T_data, Cp_data, alpha=0.2, color='darkorange',
label=f'ΔH = {delta_H/1000:.2f} kJ/mol')
ax.set_xlabel('Temperature (K)')
ax.set_ylabel('$C_p$ (J/mol·K)')
ax.set_title('Heat capacity of steam')
ax.legend(fontsize=11)
plt.tight_layout()
plt.show()
ΔH = ∫Cp dT = 22485.0 J/mol = 22.485 kJ/mol
Note
Always pass x as the second argument: trapezoid(y, x). If you write trapezoid(y) alone, it assumes unit spacing (\(\Delta x = 1\)) and gives a wrong answer when your x-axis has physical units like seconds or Kelvin.
15.4 Integration of a Python Function: scipy.integrate.quad#
The mathematics: adaptive quadrature#
When you have a Python function (not just data), quad can do far better than the trapezoidal rule. Instead of using equally spaced points, it uses adaptive quadrature: it automatically places more sample points in regions where the function changes rapidly and fewer where it is smooth.
Under the hood, quad uses Gaussian quadrature on subintervals. A \(k\)-point Gaussian quadrature rule integrates polynomials of degree up to \(2k-1\) exactly, by choosing optimal sample locations \(x_1, \ldots, x_k\) and weights \(w_1, \ldots, w_k\):
$\(\int_a^b f(x)\,dx \approx \sum_{j=1}^k w_j\, f(x_j)\)$
The positions \(x_j\) are the roots of Legendre polynomials — not equally spaced, but strategically placed. quad pairs this with an error estimator: if the error is too large on a subinterval, it splits the subinterval in half and tries again. This continues until the estimated error falls below a tolerance (\(\sim 10^{-8}\) by default).
The result is near machine precision accuracy (~14 significant digits) with far fewer function evaluations than a fine trapezoidal grid would require.
Key Python syntax#
from scipy.integrate import quad
result, error = quad(f, a, b)
f— a callable (function or lambda) taking a single float and returning a floata,b— lower and upper limits of integration (can benp.inffor infinite limits)Returns — a tuple of two values:
result— the integral estimateerror— an upper bound on the absolute error
Warning
quad always returns two values. Always unpack both:
result, error = quad(f, a, b) # better
result = quad(f, a, b) # result is now the whole tuple (float, float)
# Visualizing Gaussian Quadrature vs. Trapezoidal Rule
# Key idea: Gaussian quadrature picks a few *strategic* sample points
# (with associated weights) that can exactly integrate high-degree polynomials,
# while the trapezoid rule uses equally spaced points with uniform weights.
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as mpatches
# A smooth but non-trivial function to integrate on [0, 3]
def f(x):
return np.exp(-0.5 * x) * np.sin(2 * x) + 1.5
a, b = 0.0, 3.0
x_fine = np.linspace(a, b, 300)
# --- Trapezoidal rule: 6 equally spaced points ---
n_trap = 6
x_trap = np.linspace(a, b, n_trap)
y_trap = f(x_trap)
# --- Gaussian quadrature: 6 points (Gauss-Legendre on [a, b]) ---
# np.polynomial.legendre.leggauss returns nodes/weights on [-1, 1]
# We transform to [a, b] via: x = (b-a)/2 * xi + (a+b)/2
xi_gl, w_gl = np.polynomial.legendre.leggauss(6)
x_gauss = (b - a) / 2 * xi_gl + (a + b) / 2
w_gauss = (b - a) / 2 * w_gl # scaled weights
y_gauss = f(x_gauss)
gauss_integral = np.sum(w_gauss * y_gauss)
# Exact integral for reference
from scipy.integrate import quad as scipy_quad
exact, _ = scipy_quad(f, a, b)
# ---------------------------------------------------------------
fig, axes = plt.subplots(1, 2, figsize=(12, 4.5), sharey=True)
fig.suptitle("Gaussian Quadrature vs. Trapezoidal Rule — same number of points (6)",
fontsize=13, fontweight='bold')
# --- Left panel: Trapezoidal ---
ax = axes[0]
ax.fill_between(x_fine, f(x_fine), alpha=0.08, color='steelblue')
ax.plot(x_fine, f(x_fine), 'steelblue', lw=2, label='f(x)')
# Draw trapezoids
for i in range(n_trap - 1):
xs = [x_trap[i], x_trap[i], x_trap[i+1], x_trap[i+1]]
ys = [0, y_trap[i], y_trap[i+1], 0 ]
ax.fill(xs, ys, alpha=0.25, color='tomato')
ax.plot(xs, ys, color='tomato', lw=0.8)
# Mark sample points — all equally weighted (same size)
ax.scatter(x_trap, y_trap, s=80, color='tomato', zorder=5,
label='sample points\n(equal spacing, equal weight)')
ax.vlines(x_trap, 0, y_trap, colors='tomato', lw=1, linestyles='dashed', alpha=0.5)
trap_val = np.trapz(y_trap, x_trap)
ax.set_title(f'Trapezoidal Rule\nEstimate = {trap_val:.4f} | Error = {abs(trap_val-exact):.2e}',
fontsize=11)
ax.set_xlabel('x'); ax.set_ylabel('f(x)')
ax.set_xlim(a - 0.05, b + 0.05); ax.set_ylim(-0.1)
ax.axhline(0, color='black', lw=0.7)
ax.legend(fontsize=9)
# --- Right panel: Gaussian Quadrature ---
ax = axes[1]
ax.fill_between(x_fine, f(x_fine), alpha=0.08, color='steelblue')
ax.plot(x_fine, f(x_fine), 'steelblue', lw=2, label='f(x)')
# Marker size proportional to weight (so students see the weight idea)
w_norm = w_gauss / w_gauss.max() # normalize for display
for xi, yi, wi in zip(x_gauss, y_gauss, w_norm):
ax.vlines(xi, 0, yi, colors='seagreen', lw=1, linestyles='dashed', alpha=0.5)
ax.scatter(xi, yi, s=40 + 180 * wi, color='seagreen', zorder=5)
# Legend proxy with explanation
ax.scatter([], [], s=80, color='seagreen', label='sample points')
ax.scatter([], [], s=180, color='seagreen', alpha=0.5,
label='larger marker = higher weight')
ax.set_title(
f'Gaussian Quadrature (6-point Gauss-Legendre)\n'
f'Estimate = {gauss_integral:.4f} | Error = {abs(gauss_integral-exact):.2e}',
fontsize=11)
ax.set_xlabel('x')
ax.set_xlim(a - 0.05, b + 0.05)
ax.axhline(0, color='black', lw=0.7)
ax.legend(fontsize=9)
# Annotate the key insight
axes[1].annotate(
'Points cluster away\nfrom endpoints —\nstrategically placed',
xy=(x_gauss[1], y_gauss[1]), xytext=(1.3, 0.25),
arrowprops=dict(arrowstyle='->', color='gray'),
fontsize=8.5, color='dimgray')
plt.tight_layout()
plt.show()
print(f'Exact integral: {exact:.6f}')
print(f'Trapezoidal (6 pts): {trap_val:.6f} error = {abs(trap_val-exact):.2e}')
print(f'Gaussian quadrature (6 pts): {gauss_integral:.6f} error = {abs(gauss_integral-exact):.2e}')
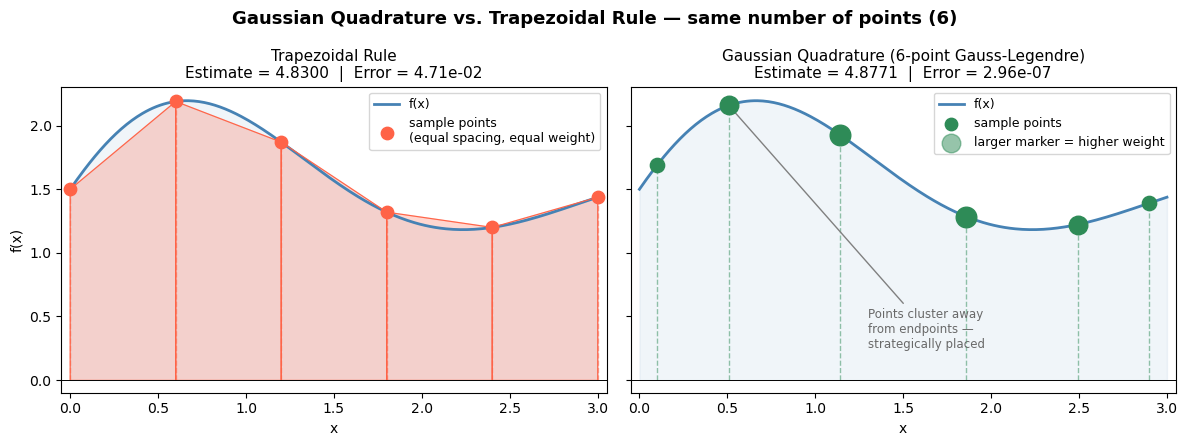
Exact integral: 4.877103
Trapezoidal (6 pts): 4.830028 error = 4.71e-02
Gaussian quadrature (6 pts): 4.877103 error = 2.96e-07
15.4.1 Basic usage#
Let’s verify quad on \(\int_0^3 x^2\,dx\), whose exact answer we can compute analytically:
$\(\int_0^3 x^2\,dx = \left[\frac{x^3}{3}\right]_0^3 = \frac{27}{3} = 9\)$
Notice that quad achieves essentially machine-precision accuracy (error \(\sim 10^{-13}\)) — far better than what the trapezoidal rule would give with a moderate number of points.
# Integrate f(x) = x^2 from 0 to 3 (exact answer = 9)
def f_sq(x):
return x**2
result, error = quad(f_sq, 0, 3)
print(f"∫₀³ x² dx = {result:.10f}")
print(f"Exact answer: 9.0000000000")
print(f"Error estimate: {error:.2e}")
∫₀³ x² dx = 9.0000000000
Exact answer: 9.0000000000
Error estimate: 9.99e-14
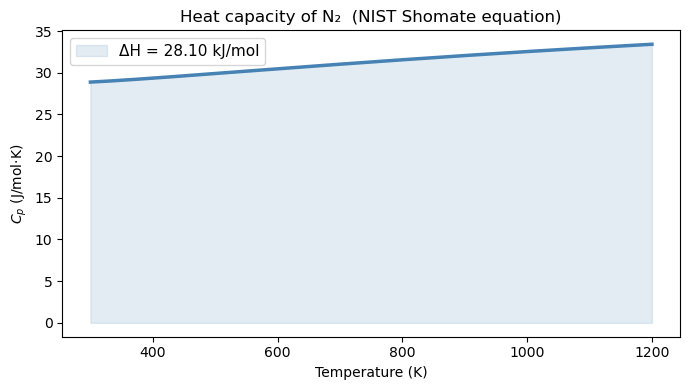
15.4.2 The motivation problem solved: \(\Delta H\) for N₂#
The NIST Shomate equation gives \(C_p\) as a polynomial in a reduced temperature \(t = T/1000\):
The enthalpy change from \(T_1\) to \(T_2\) is then: $\(\Delta H = \int_{T_1}^{T_2} C_p(T)\,dT\)$
This is a perfectly well-defined analytic function, so quad can evaluate it to near machine precision. We compare it against trapezoid with 10 and 100 points to see how accuracy scales with grid resolution — consistent with the \(\mathcal{O}(h^2)\) error of the trapezoidal rule.
# NIST Shomate coefficients for N2 (298-6000 K range)
A, B, C, D, E = 26.09200, 8.218801, -1.976141, 0.159274, 0.044434
def Cp_N2(T):
t = T / 1000.0
return A + B*t + C*t**2 + D*t**3 + E/t**2 # J/mol·K
T_low, T_high = 300.0, 1200.0
# --- Method 1: quad (high accuracy) ---
dH_quad, err = quad(Cp_N2, T_low, T_high)
# --- Method 2: trapezoid with only 10 points ---
T_10 = np.linspace(T_low, T_high, 10)
dH_trap10 = trapezoid(Cp_N2(T_10), T_10)
# --- Method 3: trapezoid with 100 points ---
T_100 = np.linspace(T_low, T_high, 100)
dH_trap100 = trapezoid(Cp_N2(T_100), T_100)
print(f"ΔH from 300 K to 1200 K:")
print(f" quad : {dH_quad:.4f} J/mol (error bound: {err:.2e})")
print(f" trapezoid 10 : {dH_trap10:.4f} J/mol (error vs quad: {abs(dH_trap10-dH_quad):.4f})")
print(f" trapezoid 100 : {dH_trap100:.4f} J/mol (error vs quad: {abs(dH_trap100-dH_quad):.6f})")
# Plot Cp(T)
T_plot = np.linspace(T_low, T_high, 300)
fig, ax = plt.subplots(figsize=(7, 4))
ax.plot(T_plot, Cp_N2(T_plot), 'steelblue', linewidth=2.5)
ax.fill_between(T_plot, Cp_N2(T_plot), alpha=0.15, color='steelblue',
label=f'ΔH = {dH_quad/1000:.2f} kJ/mol')
ax.set_xlabel('Temperature (K)')
ax.set_ylabel('$C_p$ (J/mol·K)')
ax.set_title('Heat capacity of N₂ (NIST Shomate equation)')
ax.legend(fontsize=11)
plt.tight_layout()
plt.show()
ΔH from 300 K to 1200 K:
quad : 28103.3488 J/mol (error bound: 7.51e-08)
trapezoid 10 : 28103.5655 J/mol (error vs quad: 0.2167)
trapezoid 100 : 28103.3511 J/mol (error vs quad: 0.002255)
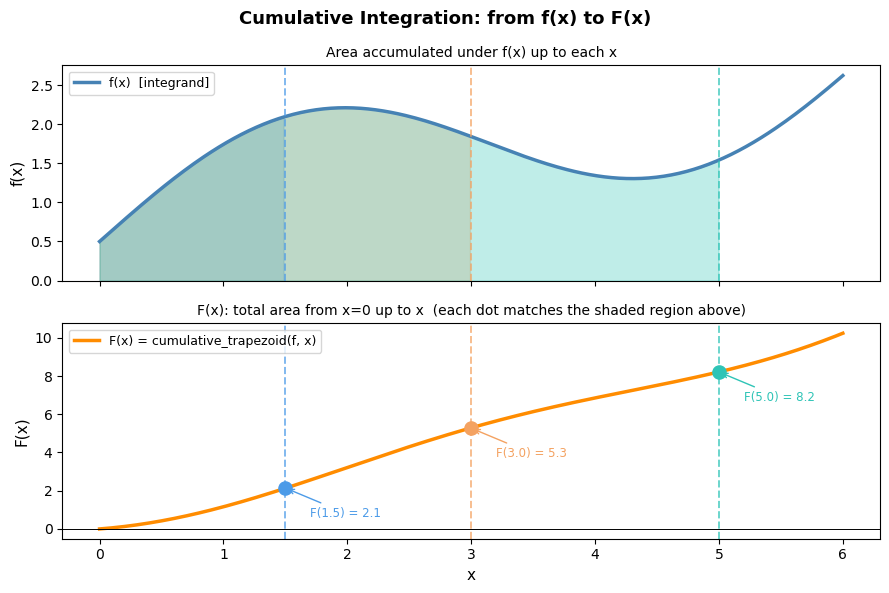
15.5 Cumulative Integration: cumulative_trapezoid#
The mathematics: a running integral#
trapezoid collapses the entire integral down to a single number. But sometimes you need the integral as a function — not just the total area, but the area accumulated up to every point.
Define the cumulative integral starting from \(x_0\): $\(F(x_i) = \int_{x_0}^{x_i} f(x)\,dx\)$
Applying the trapezoidal rule interval by interval: $\(F(x_0) = 0\)\( \)\(F(x_1) = F(x_0) + \frac{x_1 - x_0}{2}(f_0 + f_1)\)\( \)\(F(x_2) = F(x_1) + \frac{x_2 - x_1}{2}(f_1 + f_2)\)\( \)\(\vdots\)\( \)\(F(x_i) = F(x_{i-1}) + \frac{x_i - x_{i-1}}{2}(f_{i-1} + f_i)\)$
This is simply accumulating trapezoid areas one step at a time. The final element \(F(x_n)\) equals what trapezoid(y, x) returns.
Key Python syntax#
from scipy.integrate import cumulative_trapezoid
F = cumulative_trapezoid(y, x, initial=0)
y— array of function valuesx— array of \(x\) positions (always pass with physical units)initial=0— sets \(F(x_0) = 0\), so the output has the same length asyReturns — array of cumulative integral values, same length as
y
Note
Without initial=0, the output has length len(y) - 1 (one fewer element, since the first trapezoid needs two points). Using initial=0 is almost always what you want because it keeps the array length consistent with your x and y arrays.
# Visualizing cumulative integration: f(x) vs. F(x)
# The top panel shows f(x) — the rate/density.
# The bottom panel shows F(x) — the running total of area accumulated from x=0.
# Shaded regions in the top panel correspond directly to the rise in the bottom panel.
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import cumulative_trapezoid
x = np.linspace(0, 6, 300)
f = np.sin(x) + 0.4 * x + 0.5 # a smooth, non-trivial positive-ish function
F = cumulative_trapezoid(f, x, initial=0)
# Pick three x-positions to highlight accumulated area
highlight = [1.5, 3.0, 5.0]
colors = ['#4C9BE8', '#F4A261', '#2EC4B6']
fig, (ax_top, ax_bot) = plt.subplots(2, 1, figsize=(9, 6), sharex=True)
fig.suptitle('Cumulative Integration: from f(x) to F(x)', fontsize=13, fontweight='bold')
# ---- Top panel: f(x) with growing shaded areas ----
ax_top.plot(x, f, 'steelblue', lw=2.5, label='f(x) [integrand]')
ax_top.axhline(0, color='black', lw=0.7)
for xh, col in zip(highlight, colors):
mask = x <= xh
ax_top.fill_between(x[mask], f[mask], alpha=0.30, color=col)
# Mark the vertical boundary
ax_top.axvline(xh, color=col, lw=1.4, linestyle='--', alpha=0.7)
ax_top.set_ylabel('f(x)', fontsize=11)
ax_top.set_title('Area accumulated under f(x) up to each x', fontsize=10)
ax_top.legend(fontsize=9, loc='upper left')
ax_top.set_ylim(bottom=0)
# ---- Bottom panel: F(x) = cumulative integral ----
ax_bot.plot(x, F, color='darkorange', lw=2.5, label='F(x) = cumulative_trapezoid(f, x)')
ax_bot.axhline(0, color='black', lw=0.7)
for xh, col in zip(highlight, colors):
idx = np.argmin(np.abs(x - xh))
ax_bot.scatter(xh, F[idx], s=90, color=col, zorder=5)
ax_bot.axvline(xh, color=col, lw=1.4, linestyle='--', alpha=0.7)
ax_bot.annotate(f'F({xh}) = {F[idx]:.1f}',
xy=(xh, F[idx]),
xytext=(xh + 0.2, F[idx] - 1.5),
fontsize=8.5, color=col,
arrowprops=dict(arrowstyle='->', color=col, lw=1))
ax_bot.set_xlabel('x', fontsize=11)
ax_bot.set_ylabel('F(x)', fontsize=11)
ax_bot.set_title('F(x): total area from x=0 up to x (each dot matches the shaded region above)',
fontsize=10)
ax_bot.legend(fontsize=9, loc='upper left')
plt.tight_layout()
plt.show()
print('Key insight: the slope of F(x) at any point equals f(x) there.')
print('Where f(x) is large (steep function), F(x) rises quickly.')
print('Where f(x) is small (flat function), F(x) barely changes.')
Key insight: the slope of F(x) at any point equals f(x) there.
Where f(x) is large (steep function), F(x) rises quickly.
Where f(x) is small (flat function), F(x) barely changes.
# Enthalpy of N2 as a function of temperature, relative to 298 K
T_range = np.linspace(298, 1500, 500) # K
Cp_range = Cp_N2(T_range) # J/mol·K
# Cumulative integral: ΔH(T) = ∫₂₉₈ᵀ Cp dT'
dH_cumulative = cumulative_trapezoid(Cp_range, T_range, initial=0) # J/mol
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
ax = axes[0]
ax.plot(T_range, Cp_range, color='steelblue', linewidth=2)
ax.set_xlabel('Temperature (K)'); ax.set_ylabel('$C_p$ (J/mol·K)')
ax.set_title('Heat capacity of N₂')
ax = axes[1]
ax.plot(T_range, dH_cumulative / 1000, color='darkorange', linewidth=2)
ax.set_xlabel('Temperature (K)')
ax.set_ylabel('ΔH(T) (kJ/mol)')
ax.set_title('Cumulative enthalpy change from 298 K')# + r'$\Delta H(T) = \int_{298}^{T} C_p\,dT\'$')
ax.axhline(0, color='gray', linestyle='--', linewidth=1)
plt.tight_layout()
plt.show()
print(f"ΔH at T=1200 K: {dH_cumulative[np.argmin(np.abs(T_range-1200))]/1000:.2f} kJ/mol")
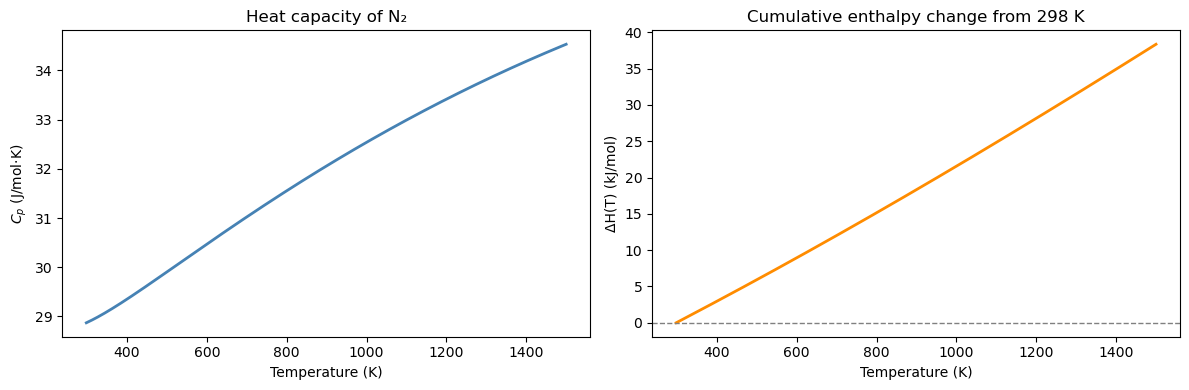
ΔH at T=1200 K: 28.12 kJ/mol
15.6 Chemical Engineering Application: PFR Design#
The mole balance and the design equation#
A plug flow reactor (PFR) is a tubular reactor in which fluid flows steadily through the tube without mixing in the axial direction. Every fluid element sees the same residence time history.
A steady-state mole balance on species A over a differential volume element \(dV\) gives: $\(F_A(V) - F_A(V + dV) + r_A\,dV = 0 \implies \frac{dF_A}{dV} = r_A\)$
Since conversion is \(X = (F_{A0} - F_A)/F_{A0}\), we have \(F_A = F_{A0}(1-X)\) and \(dF_A = -F_{A0}\,dX\). Substituting: $\(F_{A0}\frac{dX}{dV} = -r_A\)$
Rearranging and integrating from \(X=0\) to \(X=X_f\): $\(\boxed{V = F_{A0} \int_0^{X_f} \frac{dX}{-r_A(X)}}\)$
This is the PFR design equation. The integrand \(1/(-r_A)\) is called the Levenspiel integrand. The reactor volume equals \(F_{A0}\) times the area under the Levenspiel plot.
Rate law for this problem#
For a liquid-phase second-order reaction A → products, the rate law and concentrations are: $\(-r_A = k C_A^2, \qquad C_A = C_{A0}(1-X)\)\( \)\(\implies -r_A = k C_{A0}^2 (1-X)^2\)$
Substituting into the design equation: $\(V = \frac{F_{A0}}{k C_{A0}^2} \int_0^{X_f} \frac{dX}{(1-X)^2}\)$
This integral has an analytical solution: $\(\int_0^{X_f} \frac{dX}{(1-X)^2} = \left[\frac{1}{1-X}\right]_0^{X_f} = \frac{X_f}{1-X_f}\)$
So the exact answer is: $\(V_\text{exact} = \frac{F_{A0}}{k C_{A0}^2} \cdot \frac{X_f}{1 - X_f}\)$
We’ll use this to verify the numerical result from quad.
Parameter |
Value |
|---|---|
Rate constant \(k\) |
0.05 L/mol·s |
Inlet concentration \(C_{A0}\) |
2.0 mol/L |
Molar feed rate \(F_{A0}\) |
5.0 mol/s |
Target conversion \(X_f\) |
80% |
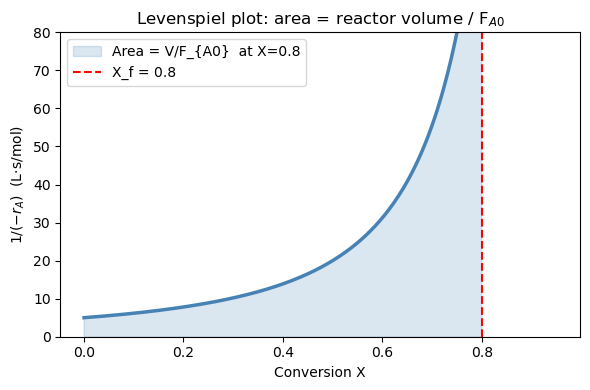
Part A: The Levenspiel plot#
The integrand \(1/(-r_A)\) is the Levenspiel integrand — plotting it vs. conversion \(X\) is standard ChE practice for reactor design.
For our second-order rate law: $\(\frac{1}{-r_A} = \frac{1}{k C_{A0}^2 (1-X)^2}\)$
As \(X \to 1\), \((1-X)^2 \to 0\), so the integrand diverges to infinity. This tells you physically that it becomes increasingly “expensive” (in volume) to achieve the last few percent of conversion — the reaction slows down dramatically as reactant is depleted.
The reactor volume is graphically the shaded area under this curve from \(X=0\) to \(X=X_f\), scaled by \(F_{A0}\).
k = 0.05 # L/mol·s
C_A0 = 2.0 # mol/L
F_A0 = 5.0 # mol/s
X_f = 0.80 # target conversion
def rate(X):
return k * C_A0**2 * (1 - X)**2 # -r_A (mol/L·s)
def levenspiel(X):
return 1.0 / rate(X) # 1/(-r_A)
X_plot = np.linspace(0, 0.95, 300)
fig, ax = plt.subplots(figsize=(6, 4))
ax.plot(X_plot, levenspiel(X_plot), 'steelblue', linewidth=2.5)
X_shade = np.linspace(0, X_f, 300)
ax.fill_between(X_shade, levenspiel(X_shade), alpha=0.2, color='steelblue',
label=f'Area = V/F_{{A0}} at X={X_f}')
ax.axvline(X_f, color='red', linestyle='--', linewidth=1.5, label=f'X_f = {X_f}')
ax.set_xlabel('Conversion X')
ax.set_ylabel(r'$1/(-r_A)$ (L·s/mol)')
ax.set_title('Levenspiel plot: area = reactor volume / F$_{A0}$')
ax.set_ylim(0, 80)
ax.legend()
plt.tight_layout()
plt.show()
Part B: Numerical integration with quad#
We compute \(V = F_{A0}\int_0^{X_f} \frac{dX}{-r_A(X)}\) numerically and compare against the exact analytical result: $\(V_\text{exact} = \frac{F_{A0}}{k C_{A0}^2} \cdot \frac{X_f}{1-X_f} = \frac{5.0}{0.05 \times 4.0} \cdot \frac{0.8}{0.2} = 25 \cdot 4 = 100 \text{ L}\)$
A relative error of \(\sim 10^{-13}\) confirms that quad achieves machine-precision accuracy.
integral, err = quad(levenspiel, 0, X_f)
V_numerical = F_A0 * integral
# Analytical answer for 2nd-order: V = (F_A0 / k*C_A0^2) * X_f/(1-X_f)
V_exact = (F_A0 / (k * C_A0**2)) * (X_f / (1 - X_f))
print(f"PFR volume for X = {X_f:.0%} conversion:")
print(f" Numerical (quad): V = {V_numerical:.4f} L")
print(f" Analytical: V = {V_exact:.4f} L")
print(f" Relative error: {abs(V_numerical - V_exact)/V_exact:.2e}")
PFR volume for X = 80% conversion:
Numerical (quad): V = 100.0000 L
Analytical: V = 100.0000 L
Relative error: 0.00e+00
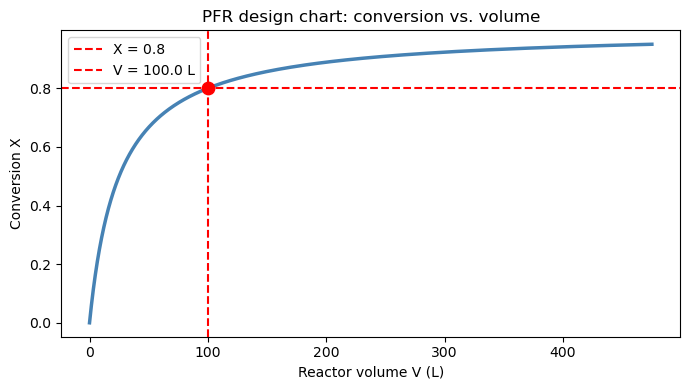
Part C: Reactor sizing chart — conversion vs. volume#
Instead of a single volume target, we can use cumulative_trapezoid on the Levenspiel integrand to build a full design chart:
$\(V(X) = F_{A0} \int_0^{X} \frac{dX'}{-r_A(X')}\)$
Each point on this curve answers the question: “What volume do I need to reach conversion \(X\)?” This is useful for comparing reactor options or evaluating sensitivity to the conversion target.
X_arr = np.linspace(0, 0.95, 500)
V_arr = F_A0 * cumulative_trapezoid(levenspiel(X_arr), X_arr, initial=0)
fig, ax = plt.subplots(figsize=(7, 4))
ax.plot(V_arr, X_arr, 'steelblue', linewidth=2.5)
ax.axhline(X_f, color='red', linestyle='--', linewidth=1.5, label=f'X = {X_f}')
ax.axvline(V_numerical, color='red', linestyle='--', linewidth=1.5, label=f'V = {V_numerical:.1f} L')
ax.scatter([V_numerical], [X_f], color='red', s=80, zorder=5)
ax.set_xlabel('Reactor volume V (L)')
ax.set_ylabel('Conversion X')
ax.set_title('PFR design chart: conversion vs. volume')
ax.legend()
plt.tight_layout()
plt.show()
Chapter 15 Summary#
Task |
Tool |
Key syntax |
|---|---|---|
Derivative of discrete data |
|
|
Integral of discrete data |
|
|
Integral of a Python function |
|
|
Running cumulative integral |
|
|
Pass parameters to |
|
|
When to use which tool#
Have discrete data? →
trapezoid(ornp.gradientfor derivatives)Have a Python function? →
quadfor highest accuracyNeed the value at every point, not just the endpoint? →
cumulative_trapezoidMore points always helps
trapezoid, butquadis already near machine precision